Arjun Lakshmipathy
PhD Student
Carnegie Mellon Univeristy
aslakshm andrew [dot] cmu [dot] edu
andrew [dot] cmu [dot] edu

Thanks for stopping by! I am a Computer Science PhD student at Carnegie Mellon University, where I am extremely fortunate to be advised by Nancy Pollard. I have previously also spent time as a Visiting Researcher at Meta Fundamental AI Research (FAIR). Before moving to Pittsburgh, I spent 6 wonderful years in Los Angeles, where I received both my MS degree in Computer Science under the helpful supervision of Demetri Terzopoulos and dual BS degrees in Computer Science & Engineering + Math Economics at UCLA.
I am also a seasoned professional developer, having previously spent time as a Founding Scientist / Engineer at NeuralX Inc., a Software Engineer at Rally Health Inc., and a number of internships.
My research revolves around intelligent dexterous systems, such as multi-fingered hands, digital humans, and humanoid robots. These types of systems are notoriously challenging to reliably design and precisely control due to sporting high degrees of freedom and complex interaction mechanics. And while we have seen incredible final demos of such systems over the past few years, authoring them is still a difficult and high-stakes process that requires deep domain expertise to navigate. I want to understand what it takes, and ultimately build tools and frameworks, to enable anyone to author dexterous systems from conception through final implementation as simply and intuitively as possible. In support of this goal, my work adopts a holistic view of the authoring process to target practical, yet fundamental problems in visualization, modeling, and control that real engineers, designers, and users of such systems regularly face.
My work spans robotics, visual computing, and AI. Most recently, I have been focusing on the collection, modeling, and exploitation of realistic contact areas, which I believe will play an important role in the future of dexterous manipulation, tactile sensing, hand design, and soft robotics.
Publications

|
Geodesic Tracing-Based Kinematic Integration of Rolling and Sliding Contact on Manifold Meshes for Dexterous In-Hand Manipulation
S. Wang, A.S. Lakshmipathy, J. Oh, N.S. Pollard IEEE International Conference on Humanoid Robotics (Humanoids), Seoul, South Korea 2025 [PDF] [arXiv] [Video] [BibTex] |
|
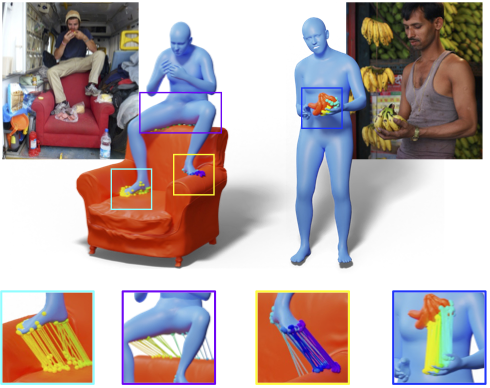
PICO: Reconstructing 3D People In Contact with Objects
A. Cseke*, S. Tripathi*, S. K. Dwivedi, A.S. Lakshmipathy, A. Chatterjee, M. J. Black, D. Tzionas IEEE/CVF Computer Vision and Pattern Recognition (CVPR), Nashville, USA 2025 [PDF] [Publication] [Website] [BibTex] |
|
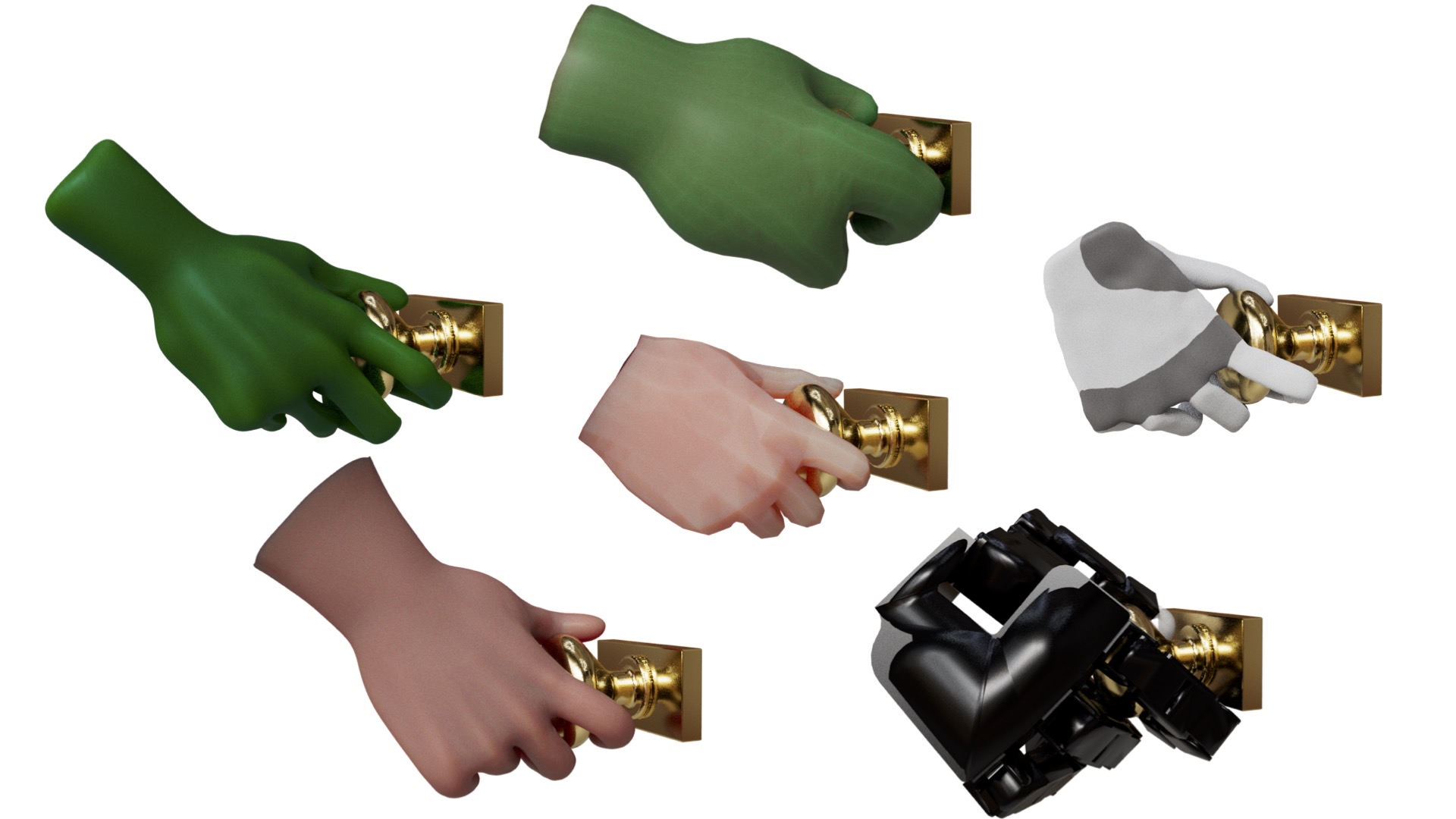
Kinematic Motion Retargeting for Contact-Rich Anthropomorphic Manipulations
A.S. Lakshmipathy, J.K. Hodgins, N.S. Pollard ACM Transactions on Graphics (Presented at SIGGRAPH), Vancouver, Canada 2025 [PDF] [Publication] [Video] [Code] [BibTex] |
|
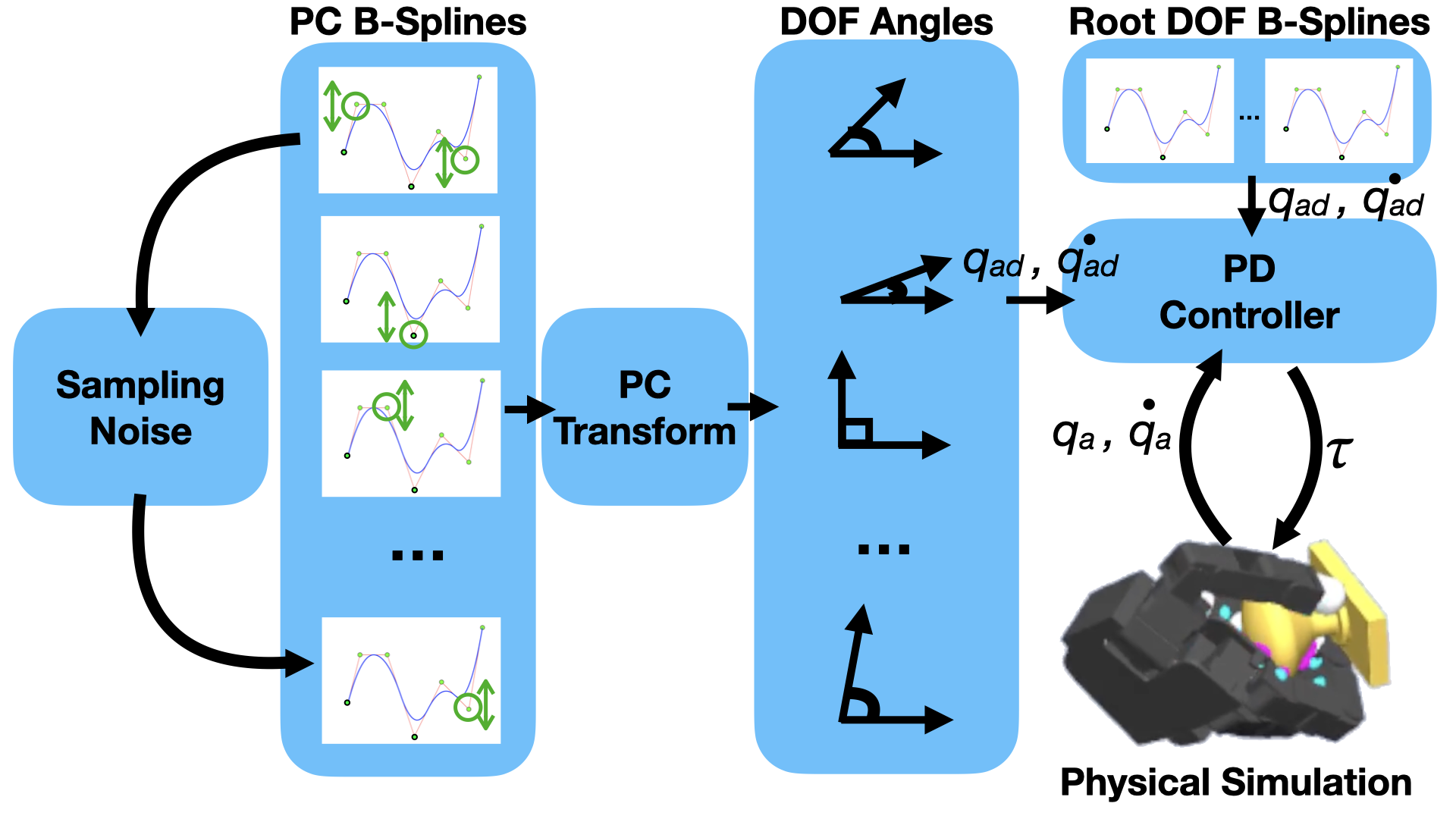
ContactMPC: Towards Online Adaptive Control for Contact-Rich Dexterous Manipulation
A.S. Lakshmipathy, N.S. Pollard Robotics: Science and Systems - Workshop on Dexterous Manipulation: Design, Perception and Control, Delft, Netherlands 2024 [PDF] [Publication] [Video] [BibTex] |
|
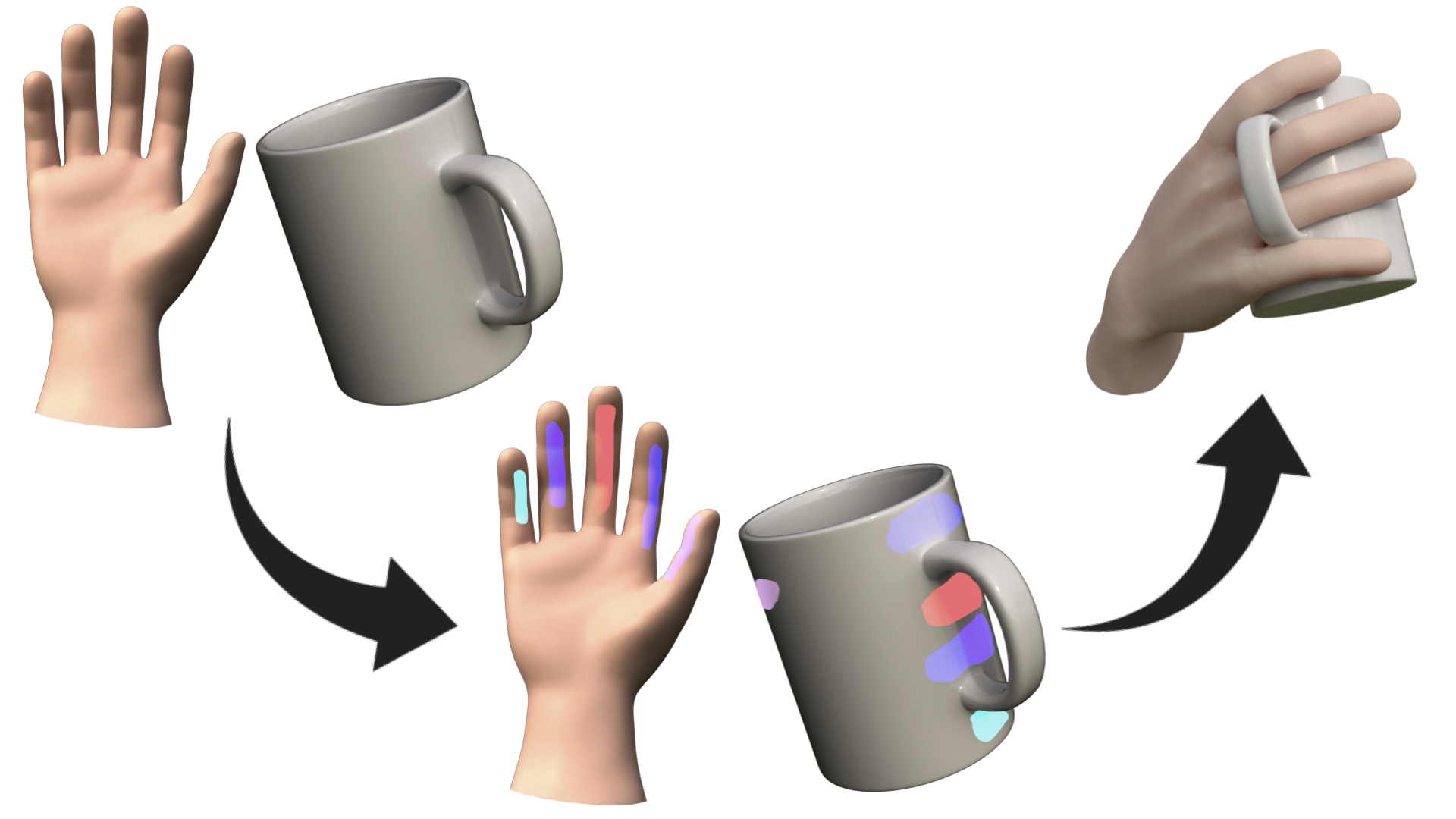
Contact Edit: Artist Tools for Intuitive Modeling of Hand-Object Interactions
A. S. Lakshmipathy, N. Feng, Y. X. Lee, M. Mahler, N.S. Pollard ACM Transactions on Graphics (Presented at SIGGRAPH), Los Angeles, USA 2023 [PDF] [Publication] [Video] [BibTex] |
|
|
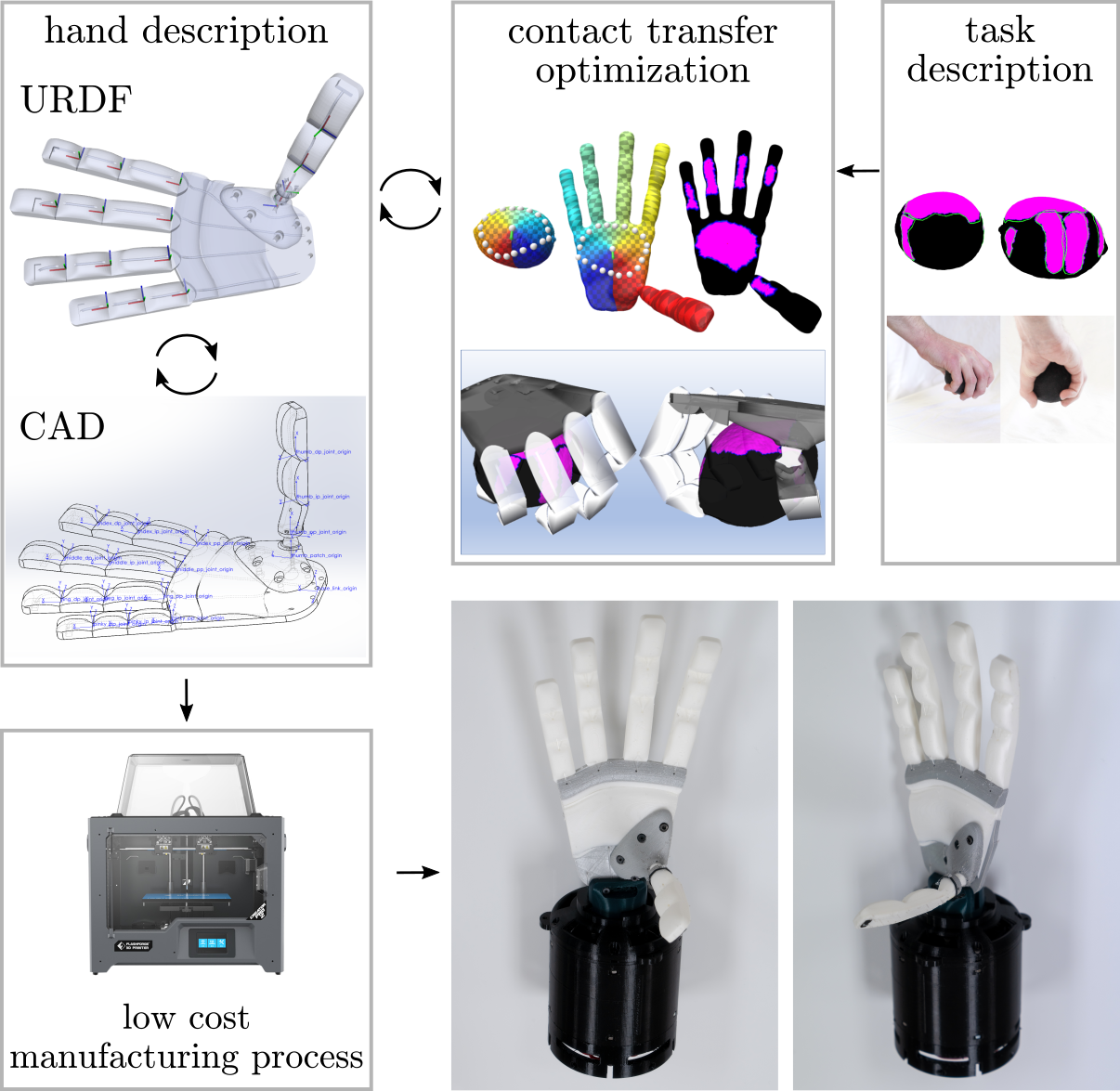
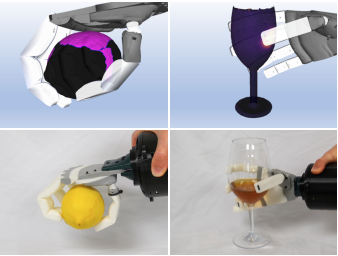
Contact Transfer: A Direct, User-Driven Method for Human to Robot Transfer of Grasps and Manipulations
A. Lakshmipathy, D. Bauer, C. Bauer, N.S. Pollard IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, USA 2022 [PDF] [Publication] [Video] [Talk] [BibTex] |
|
Towards Very Low-Cost Iterative Prototyping for Fully Printable Dexterous Soft Robotic Hands
D. Bauer, C. Bauer, A. Lakshmipathy, R. Shu, N.S. Pollard IEEE International Conference on Soft Robotics (ROBOSOFT), Edinburgh, UK 2022 [PDF] [Publication] [Video] [BibTex] |
|
Fully Printable Low-Cost Dexterous Soft Robotic Manipulators for Agriculture
D. Bauer, C. Bauer, A. Lakshmipathy, N.S. Pollard AAAI Conference on Artificial Intelligence - Workshop on AI for Agriculture and Food Systems, Vancouver, Canada 2022 [PDF] [Publication] [BibTex] |
|
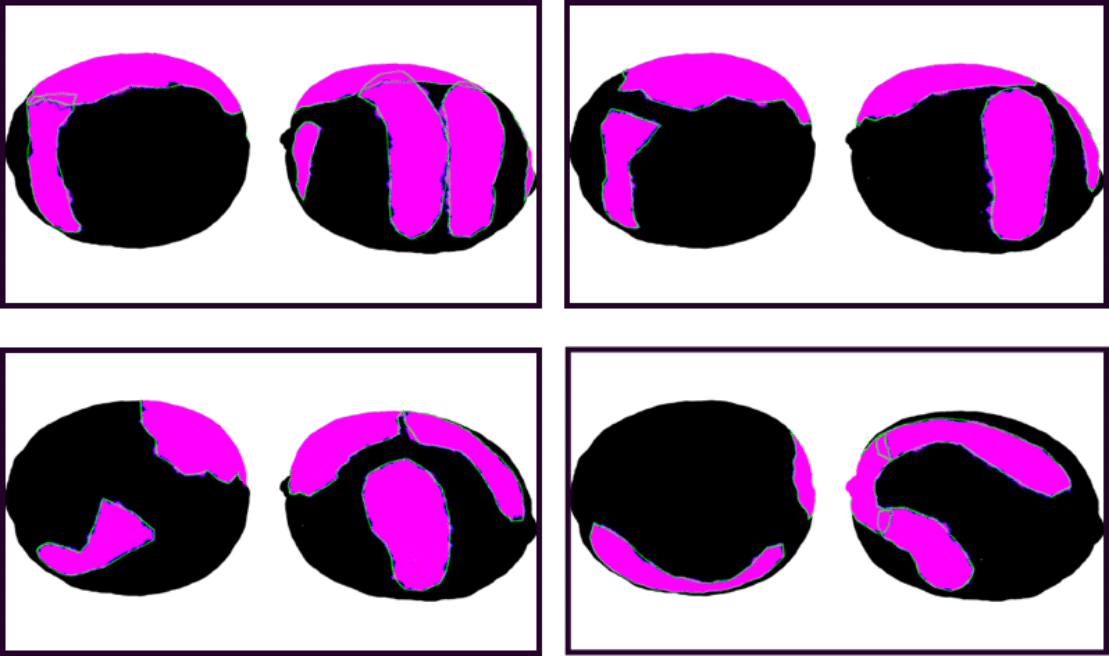
Contact Tracing: A Low Cost Reconstruction Framework for Surface Contact Interpolation
A. Lakshmipathy, D. Bauer, N.S. Pollard IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic 2021 [PDF] [Publication] [Video] [Talk] [BibTex] |
|
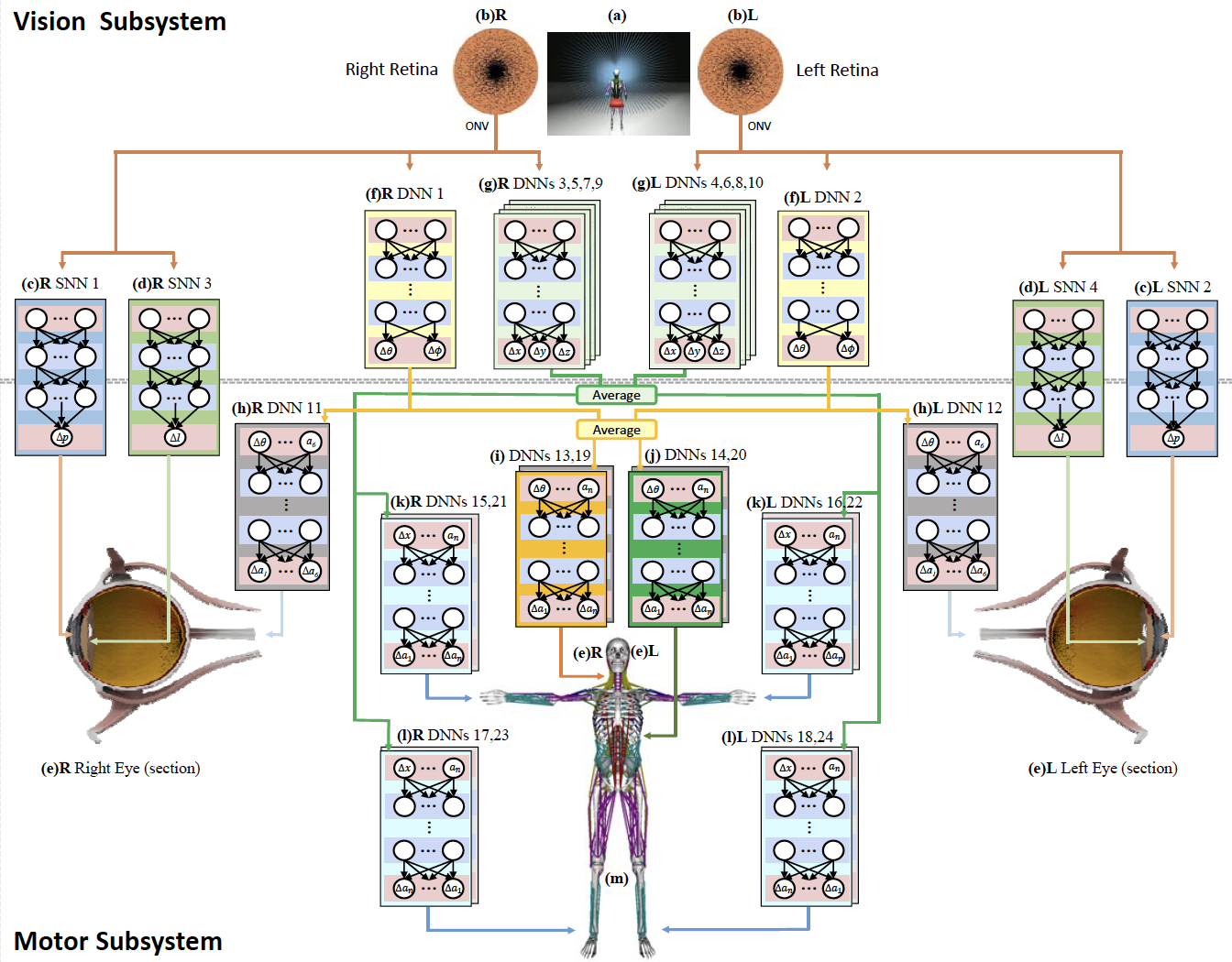
Locally-Connected, Irregular Deep Neural Networks for Biomimetic Active Vision in a Simulated Human
M. Nakada*, H. Chen*, A. Lakshmipathy, D. Terzopoulos IEEE International Conference on Pattern Recognition (ICPR), Milano, Italy 2021 [PDF] [Publication] [BibTex] |
|
Deep Learning of Neuromuscular and Visuomotor Control in a Biomimetic Simulated Humanoid
M. Nakada, T. Zhou, H. Chen, A. Lakshmipathy, D. Terzopoulos IEEE Robotics and Automation Letters (RA-L) 2020 [PDF] [Publication] [BibTex] |
|
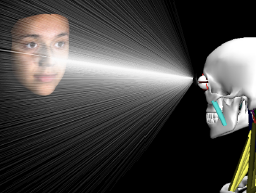
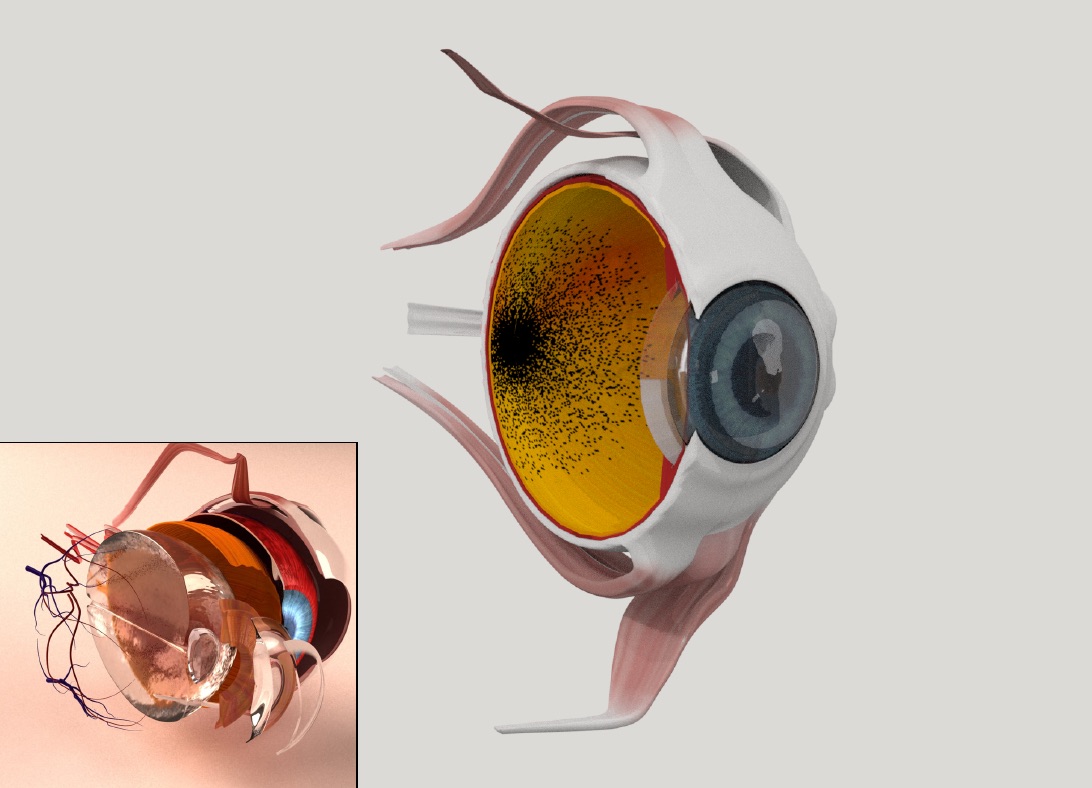
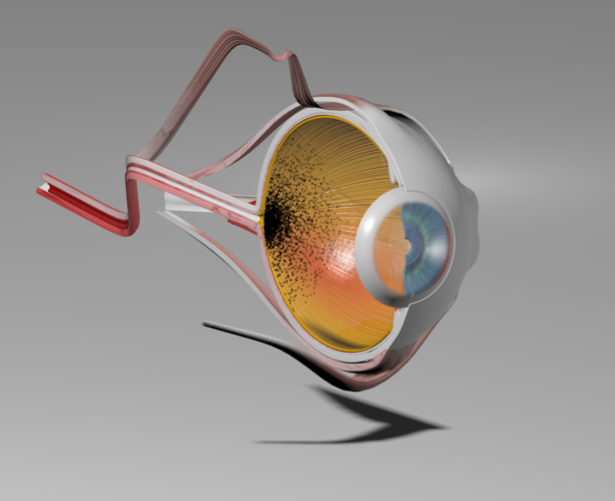
Biomimetic Eye Modeling & Deep Neuromuscular Oculomotor Control
M. Nakada*, A. Lakshmipathy*, H. Chen, X. Ling, T. Zhou, D. Terzopoulos ACM Transactions on Graphics (Presented at SIGGRAPH Asia), Brisbane, Australia 2019 [PDF] [Publication] [Video] [BibTex] |
|
Biomimetic Modeling of the Eye and Deep Neuromuscular Oculomotor Control
A. Lakshmipathy M.S. Thesis, Computer Science Department, Univeristy of California, Los Angeles 2018 [PDF] [Publication] [BibTex] |
* Indicates equal contribution