11/27/2023 – Our “Causal-HRI: Causal Learning for Human-Robot Interaction” workshop was accepted to HRI 2024! See you in Boulder, CO and online on March 11, 2024!
10/5/2023 – Thank you to all of our attendees, speakers, and organizers of our IROS 2023 workshop! “Causality for Robotics: Answering the Question of Why” was a great success!
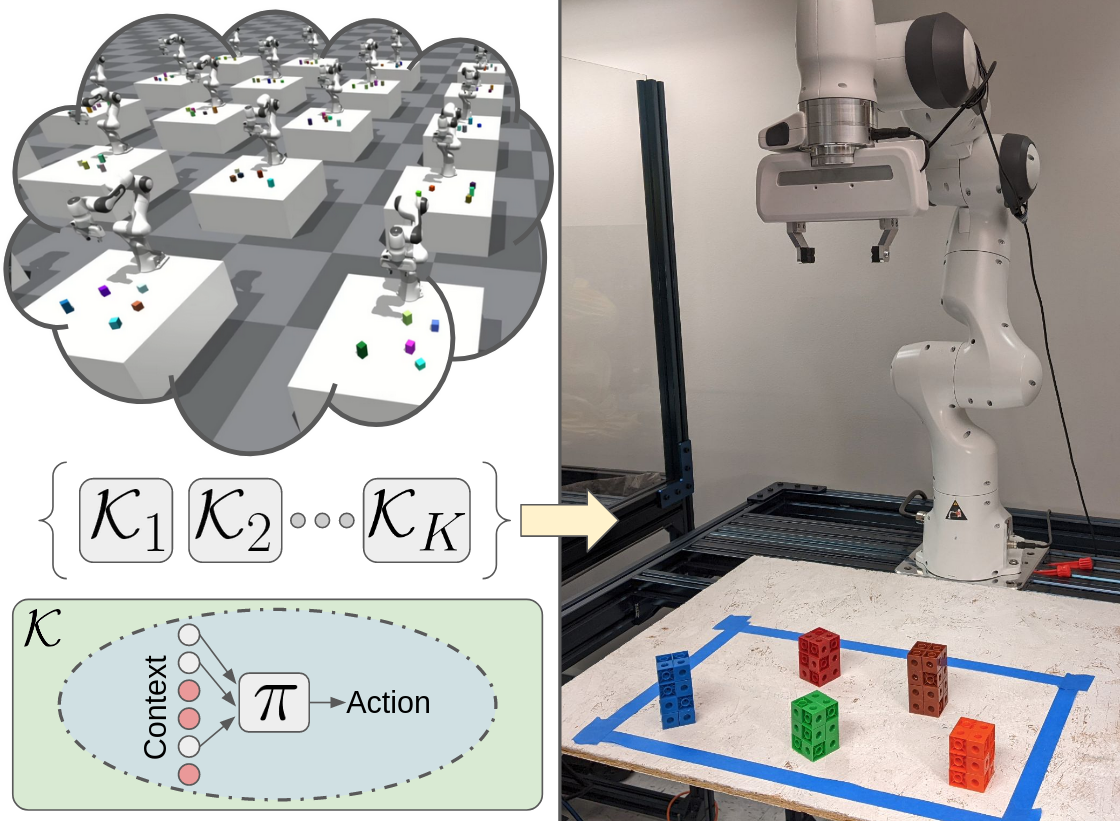
8/30/2023 – Thrilled to share that SCALE, our work for discovering skills using causal learning, has been accepted to CoRL! Huge thanks to my co-authors for making this possible!
5/22/2023 – I have joined Lockheed Martin Space’s Advanced Technology Center for an internship on causal learning and discovery! Looking forward to the summer!
4/28/2023 – Our IROS 2023 workshop proposal was accepted! “Causality for Robotics: Answering the Question of Why” will be held on October 5, 2023 in Detroit, MI!
4/12/2023 – Thank you, UM GENDiR, for a wonderful opportunity to talk about my research and lived experiences in robot and human transfer learning for the GENDiR Seminar Series!
9/30/2022 – Successfully passed my Ph.D. in Robotics thesis proposal! Excited to continue research in causal robot learning for manipulation!
4/13/2022 – Excited to share that I have been selected as a 2022 NCWIT Collegiate Award Honorable Mention recipient for my research in causal robot learning!
4/1/2022 – Our work in creating the 15-996 DEI graduate course has been recognized through the CMU Graduate Student Service Award!
2/17/2022 – Gave a talk to the Intelligent Control Lab at CMU! Thank you ICL for the opportunity to share our work in using CREST for causal feature selection!
2/15/2022 – Our “Learning By Doing” NeurIPS 2021 Competition paper is now live on arXiv and will appear in a forthcoming issue of PMLR!
12/22/2021 – Honored to be selected as a 2022 NCWIT Collegiate Award Finalist for my Ph.D. thesis research!
12/10/2021 – Released the “Learning By Doing” NeurIPS 2021 Competition code to GitHub! Recordings of our NeurIPS session are also available on the LBD website.
10/25/2021 – Thank you so much, Toronto, for the wonderful opportunity to speak about our work in causal structure and transfer learning at the AI in Robotics seminar! [Video]
7/12/2021 – Grateful to be selected as an Inclusion@RSS Fellow for RSS 2021!
7/1/2021 – Congrats to Vicky Zeng! Her recent paper, “Visual Identification of Articulated Object Parts”, was accepted to IROS 2021!
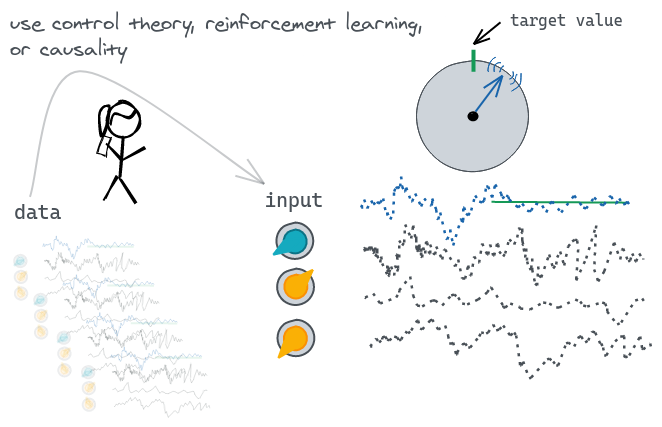
6/1/2021 – Thrilled to help co-organize the “Learning By Doing” NeurIPS 2021 Competition! Excited to bring together researchers and practitioners in control theory, reinforcement learning, and causality!
4/19/2021 – Siddharth Girdhar received a Summer Undergraduate Research Fellowship (SURF) for his proposal on Causal Dynamics Models. Way to go, Sid! Looking forward to collaborating this summer!
4/10/2021 – Vicky Zeng’s IROS 2021 submission, “Visual Identification of Articulated Object Parts”, is now available on arXiv. Best of luck for acceptance!
2/28/2021 – My paper submission to ICRA 2021, “Causal Reasoning in Simulation for Structure and Transfer Learning of Robot Manipulation Policies”, has been accepted! Thanks so much to my collaborators for your hard work – this one feels great!
2/12/2021 – Excited to kick off the pilot course of 15-996: “Diversity, Equity, and Inclusion in Computer Science and Society” as a discussion moderator!
6/29/2020 – The source code for DREAM (my NVIDIA internship work) is officially released on GitHub!
5/4/2020 – Vicky Zeng received a Summer Undergraduate Research Fellowship (SURF) for her proposal, “Visual Identification of Articulated Objects
through a Large-Scale Dataset”. Excellent work! Looking forward to working with you this summer with Jacky Liang!
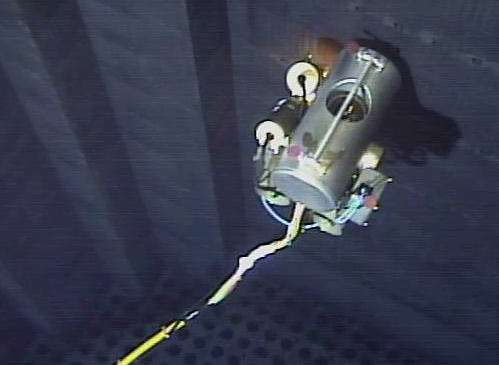
2/14/2020 – Gave a talk at the University of Maryland Robotics Center about my M.S. work in ROV state estimation. Thank you for the invitation to speak at my alma mater!
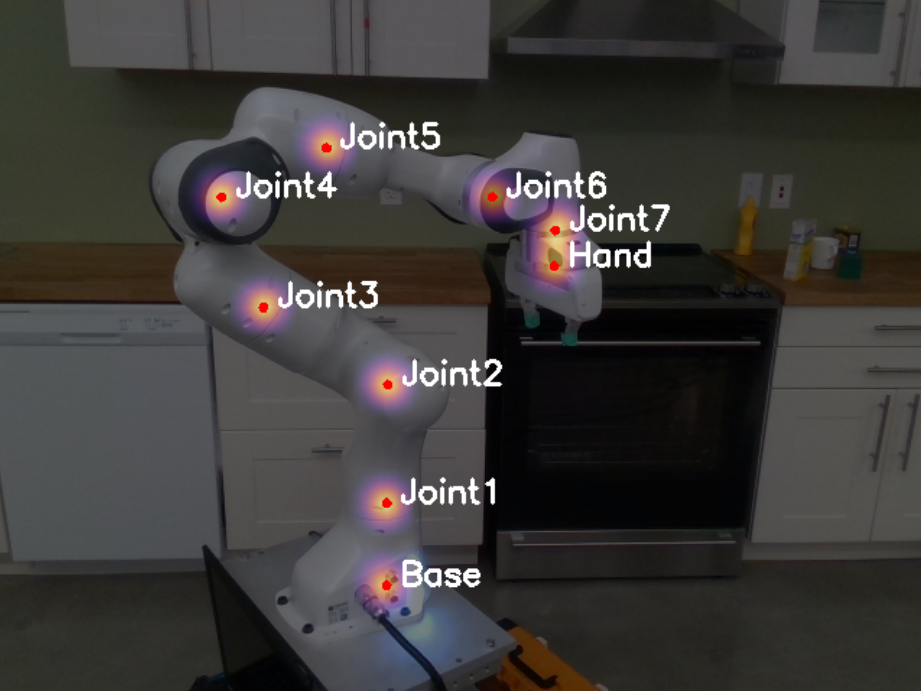
1/21/2020 – My NVIDIA summer internship work (“Camera-to-Robot Pose Estimation from a Single Image”) has been accepted to ICRA 2020!
11/22/2019 – My NVIDIA summer internship work (“Camera-to-Robot Pose Estimation from a Single Image”) is now publically released on arXiv. It is currently under review for ICRA 2020. Thanks to my collaborators at NVIDIA’s Seattle Robotics Lab, especially my mentors Jonathan Tremblay and Stan Birchfield, for the wonderful opportunity!
12/10/2018 – I have accepted a summer research internship with NVIDIA at the Seattle Robotics Lab, headed by Prof. Dieter Fox.
10/18/2018 – I have joined Prof. Oliver Kroemer and the IAM Lab for my Ph.D. research.