The open loop TF is of the same for as that in Lab 1, i.e.

In this lab, treat the Amplifier as part of the motor-tach system. Since the
amplifier's gain always multiplies the motor's gain, the product of the two can be treated
as the entire system's gain, and there is no need to deal with them separately. Since you
may be using a different motor and tachometer, it is necessary to first identify the motor
from its open-loop response.
The motor's gain and time constant can be computed from the open-loop step response,
just as was done in Lab 1.
-
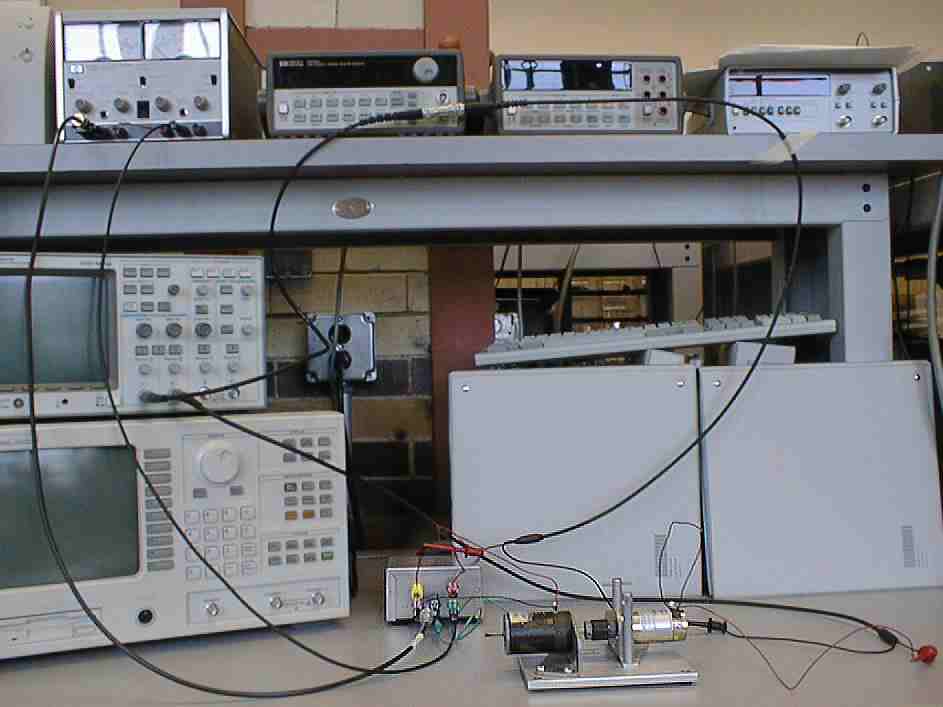
Connect Power Supply to Amplifier
The amplifier is powered with +/-20V from the dual power supply. This requires three
connections: +20V, GND, and -20V.
 | Set the power supply tracking switch to Independent, and set each side of the
power supply to 20V. Turn the supply off! |
| Connect the negative terminal of the left side of the supply to the positive terminal of
the right side with a jumper wire (see picture), creating the GND signal from either of
the connected terminals. |
| Attach a Co-ax/banana adapter to the left side of the supply, with the GND tab to
the right. This gives +20V and GND. |
| Attach a banana cable to the negative terminal of the right side. This gives -20V. |
| Attach a Co-ax/banana adapter to the +V and GND terminals of the amplifier with the
GND tab to the right. |
| Connect this to the Co-ax adapter on the power supply with a Co-ax cable. |
| Plug the banana cable from the -20V on the power supply to the -V terminal of the
amplifier. |

|

|
| Power Supply |
Amplifier |
-
Connect Motor and Tach to Amplifier, Oscilloscope and Function Generator
| Connect the black lead from the motor to the GND terminal of the amplifier, and the red
lead to the OUT terminal of the amplifier. These leads should be screwed down to the
terminal post. |
| Attach an alligator clip wire to the GND terminal of the amplifier. |
| Connect one tachometer lead to the GND alligator. |
| Connect a Co-ax/pigtail cable to input 2 of the oscilloscope. Clip the black lead to the
GND alligator, and the red lead to the loose lead from the tach. |
| Attach a short wire to the IN terminal of the amplifier. |
| Attach a Co-ax T-connector to the output of the function generator. |
| Connect the function generator output to input 1 of the oscilloscope. |
| Connect a Co-ax/pigtail cable to the function generator's output. Clip the black lead to
the GND alligator, and the red lead to the IN terminal of the amplifier. |
|
| Setup for Open-Loop |
-
Set the function generator and oscilloscope.
| Set function generator to a square wave with amplitude 100mV (This is really 200mVP-P)
and frequency 1Hz. |
| Set the function generator offset to 100mV. (This is really a 200mV offset). This offset
is to ensure that the motor is always moving. If the motor is allowed to stop, static
friction will affect the response. The step response will occur between a low speed and a
high speed, rather than from a stop. |
| Set oscilloscope voltage scale for input 1 (the input from the fcn. gen.) to 100mV/div. |
| Set the time scale to 20ms/div. |
| Set the horizontal delay to 80ms (this moves the step to the left of the screen so that
the entire step response can be seen.) |
| Set the trigger mode to "normal" and set the trigger level at about 200mV. If
you have trouble triggering, try setting it to ``single'' mode. |
| Set the vertical position of trace 1 so the step trace appears on the upper half of the
screen. |
| Set the voltage scale for input 2 (the tach output) to 1V/div. |
| Set the vertical offset so the origin of trace 2 is near the bottom of the screen. |
-
Measure Step Response
| Turn on power. The motor should spin, and you should get a response similar to that
shown below. |
| Use the cursors to measure the difference in voltage levels between the initial and
final values of the output step response. Be sure to use the cursors for trace 2. Record
this value. |
| Print the resulting screen. |
| In Lab, calculate the K and  values from your step response. Use either the settling time or initial
slope method for . You
will use these values later. values from your step response. Use either the settling time or initial
slope method for . You
will use these values later. |
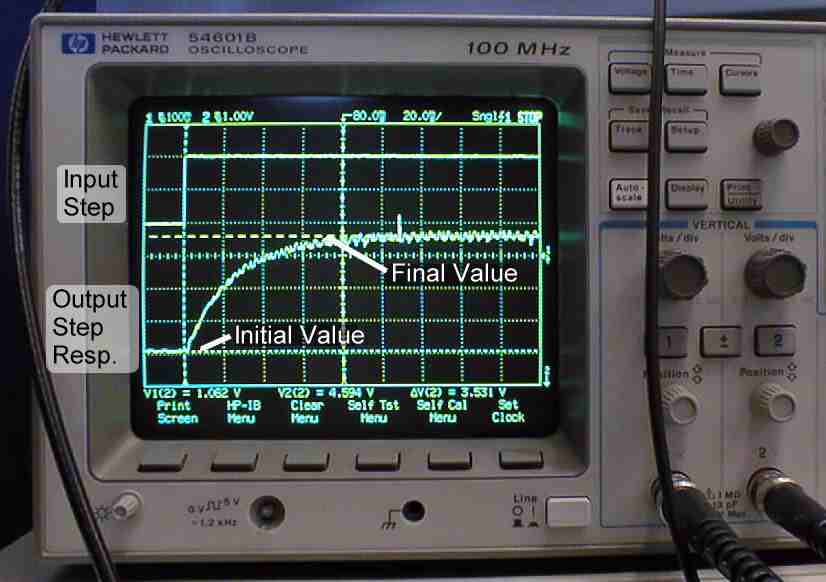
|
| Open-Loop Step Response |
Rather than plotting the entire frequency response, you will just evaluate the bandwidth.
The bandwidth is defined as the frequency above which the output amplitude in response to
a sinusoidal input is 3dB below (-3dB is equivalent to multiplying by .707) the output
amplitude to a low-frequency sinusoid. The bandwidth is a common characteristic for
defining the performance of a control system since a system can respond well only to
frequencies below its bandwidth.
 | Set the function generator to a sine wave with frequency .5Hz. |
| Adjust time scale to properly view the sinusoid. |
| Measure the output amplitude with the cursors. Try to disclude any noise from your
measurements. Record this value - this is the low-frequency amplitude. Print this screen. |
| Compute the amplitude which is 3dB below the low-frequency amplitude. |
| Increase the input frequency until the output amplitude is 3dB below the low-frequency
amplitude. Change time scales if necessary in order to disclude noise. Record this
amplitude and the bandwidth frequency. Print this screen. |
The disturbance, in this lab, will simply be a torque applied to the shaft of the motor
by hand. Since we can't measure this, you will only get a qualitative idea of the effect
of the disturbance. In order to best see the disturbance response, a "command"
of zero will be sent to the motor (in this case, it means no input to the motor.)
| Set the function generator to a DC voltage by holding any of the function shape buttons
for several seconds. Set the level to zero volts. |
| Turn the shaft of the motor gently and get a feel for how much resistance to turning
there is. |
Next- Proportional Control
[ Up ] [ Open Loop Response ] [ Proportional Control ] [ Positive Feedback ] [ Writeup ]