| Turn off the power supply, oscilloscope, and fcn. gen., and turn on the spectrum analyzer. | |
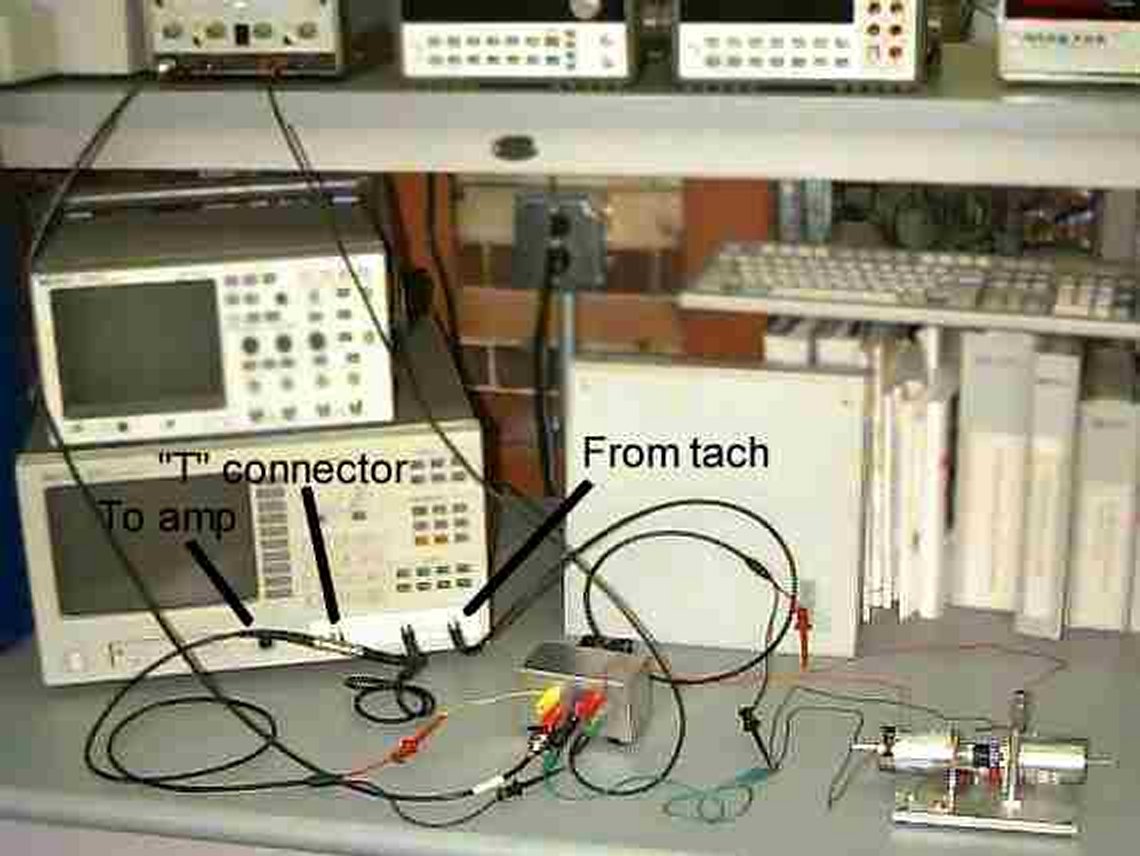
| Attach a "T" connector to the output of the spectrum analyzer. | |
| Connect one side of the "T" connector to input 1 of the spectrum analyzer with a co-ax cable. This allows the spectrum analyzer to read it's own output. | |
| Detach the co-ax/pigtail cable from the fcn. gen. and connect it to the free end of the "T" connector on the spectrum analyzer output. | |
| Detach the co-ax cable from the input 2 of the oscilloscope and attach it to input 2 of the spectrum analyzer. |
| Press Inst Mode button. | |
| Select Swept Sine. | |
| Press Freq button. | |
| Set Start to 0.2Hz. | |
| Set Stop to 100Hz. | |
| Set Sweep to AUTO, LIN, and UP. | |
| Select Res. Setup. | |
| Set Auto Res. to ON. | |
| Set Min Res to 101 pts/sweep. | |
| Set Max % change to 2.5%. | |
| Press Source button. | |
| Set Level to 200mVpk | |
| Press Scale button. | |
| Set Autoscale to ON. | |
| Turn on power supply. | |
| Press Start button. Motor will begin to oscillate back and forth. The frequency will gradually increase (it spends more time at lower frequencies). The whole process takes several minutes. Wait until the analysis is complete. | |
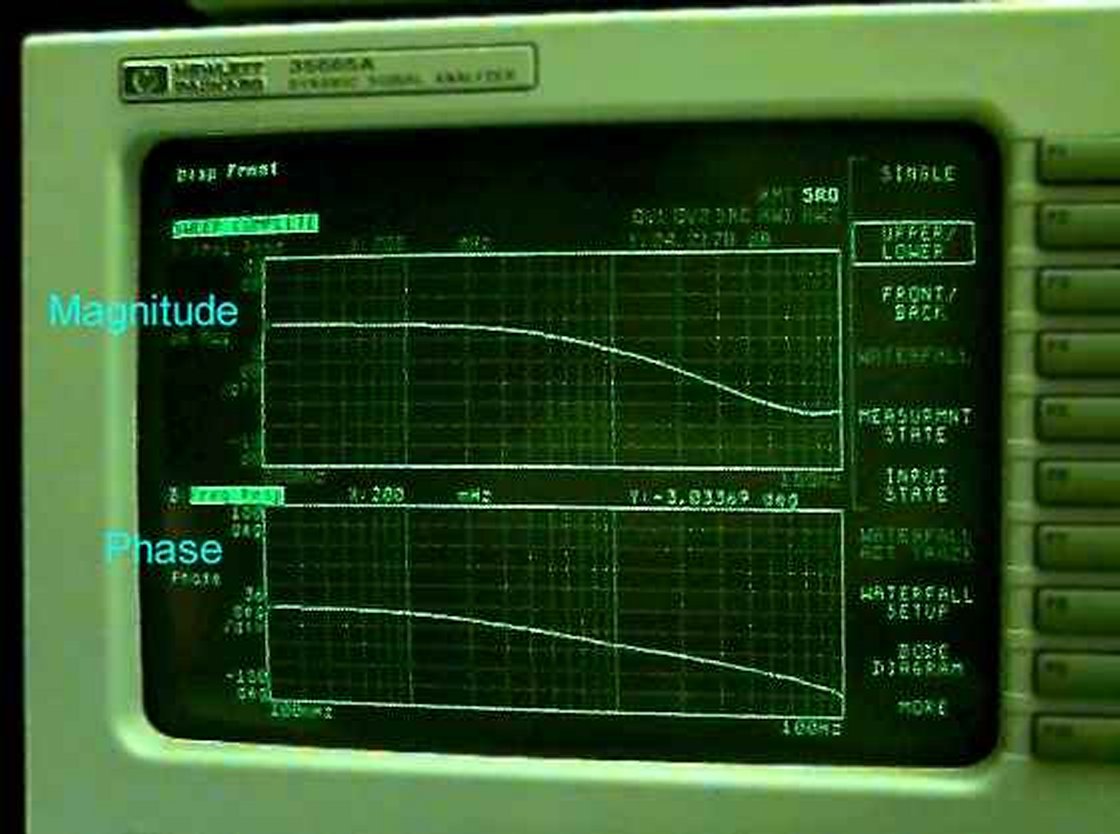
| Press Disp Format button. | |
|
Select Bode Diagram. | |
| Print this screen. | |
| If you have time, repeat the analysis between frequencies of 1Hz and 1000Hz. |