Cooperative Localization in the Connected Vehicle Network

Good localization is essential in the deployment of autonomous vehicles. Currently, high accuracy GNSS devices are still too expensive for passenger cars. Based on the booming V2X or Connected Vehicle technology, we are exploring approaches that can enhance localization quality for a network of vehicles on average but with no extra cost, as long as the vehicles are connected by exchanging their raw GNSS information.
Improving Localization Accuracy in the Connected Vehicle Network
 Macheng Shen, Ding Zhao, Jing Sun,
''Enhancement of Low-cost GNSS Localization in Connected Vehicle Networks Using Rao-Blackwellized Particle Filters,
'' Proceedings of the IEEE 19th International Intelligent Transportation Systems Conference (ITSC), Rio de Janeiro, Brazil, Nov 1-4, 2016. |
Macheng Shen, Ding Zhao, Jing Sun,
''Enhancement of Low-cost GNSS Localization in Connected Vehicle Networks Using Rao-Blackwellized Particle Filters,
'' Proceedings of the IEEE 19th International Intelligent Transportation Systems Conference (ITSC), Rio de Janeiro, Brazil, Nov 1-4, 2016. |
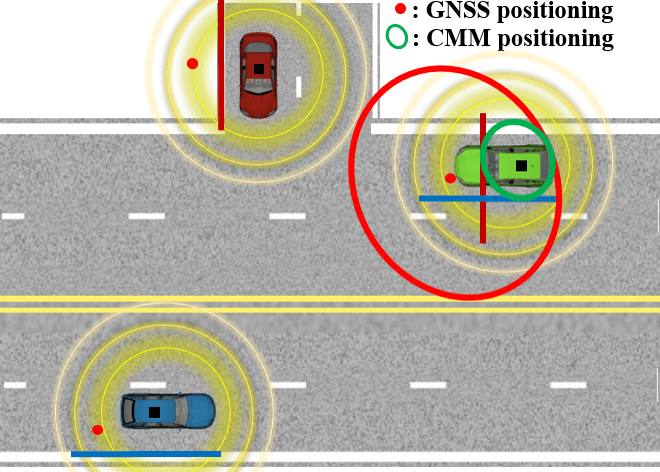
Abstract — Cooperative map matching (CMM) uses the Global Navigation Satellite System (GNSS) position information of a group of vehicles to improve the standalone localization accuracy. It has been shown, in our previous work, that
the GNSS error can be reduced from several meters to sub-meter level by matching the biased GNSS positioning to a digital map with road constraints. While further error reduction is expected by increasing the number of participating vehicles, fundamental
questions on how the vehicle membership within CMM affects the performance of the CMM results need to be addressed to provide guidelines for design and optimization of the vehicle network. This work presents a theoretical study that establishes
a framework for quantitative evaluation of the impact of the road constraints on the CMM accuracy. More specifically, a closed-form expression of the CMM error in terms of the road constraints and GNSS error is derived based on a simple CMM rule.
The asymptotic decay of the CMM error as the number of vehicles increases is established and justified through numerical simulations. Moreover, it is proved that the CMM error can be minimized if the directions of the roads on which the connected
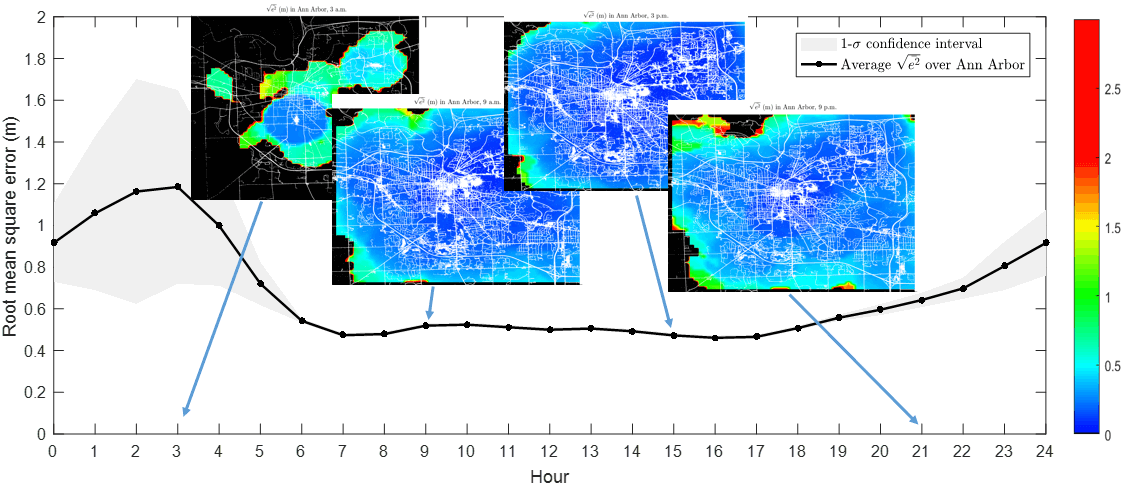
vehicles travel obey a uniform distribution. Finally, the localization accuracy of CMM is evaluated based on the Safety Pilot Model Deployment and Pillar dataset of Ann Arbor traffic flow collected over three years period. The contributions of this
work include establishing a theoretical foundation for CMM as well as providing insight and motivation for applications of CMM.
The Impact of Road Configuration on V2V-based Cooperative Localization
 Macheng Shen, Ding Zhao, Jing Sun,
''The Impact of Road Configuration on V2V-based Cooperative Localization,''
IEEE 85th Vehicular Technology Conference (VTC), Sydney, Australia, June 4-7, 2017.
|
Macheng Shen, Ding Zhao, Jing Sun,
''The Impact of Road Configuration on V2V-based Cooperative Localization,''
IEEE 85th Vehicular Technology Conference (VTC), Sydney, Australia, June 4-7, 2017.
|
Macheng Shen, Jing Sun, Ding Zhao ''The Impact of Road Configuration in V2V-based Cooperative Localization: Mathematical Analysis and Real-world Evaluation,''
IEEE Transactions on Intelligent Transportation Systems, 2017. |
Abstract — Cooperative map matching (CMM) uses the Global Navigation Satellite System (GNSS) position information of a group of vehicles to improve the standalone localization accuracy. It has been shown, in our previous work, that
the GNSS error can be reduced from several meters to sub-meter level by matching the biased GNSS positioning to a digital map with road constraints. While further error reduction is expected by increasing the number of participating vehicles, fundamental
questions on how the vehicle membership within CMM affects the performance of the CMM results need to be addressed to provide guidelines for design and optimization of the vehicle network. This work presents a theoretical study that establishes
a framework for quantitative evaluation of the impact of the road constraints on the CMM accuracy. More specifically, a closed-form expression of the CMM error in terms of the road constraints and GNSS error is derived based on a simple CMM rule.
The asymptotic decay of the CMM error as the number of vehicles increases is established and justified through numerical simulations. Moreover, it is proved that the CMM error can be minimized if the directions of the roads on which the connected
vehicles travel obey a uniform distribution. Finally, the localization accuracy of CMM is evaluated based on the Safety Pilot Model Deployment and Pillar dataset of Ann Arbor traffic flow collected over three years period. The contributions of this
work include establishing a theoretical foundation for CMM as well as providing insight and motivation for applications of CMM.
Optimization of Vehicle Connections in V2V-based Cooperative Localization
 Macheng Shen, Jing Sun, Ding Zhao,
''Optimization of Vehicle Connections in V2V-based Cooperative Localization, ''
Proceedings of the IEEE 20th International Intelligent Transportation Systems Conference (ITSC), Yokohama, Japan, October 16-19, 2017.
|
Macheng Shen, Jing Sun, Ding Zhao,
''Optimization of Vehicle Connections in V2V-based Cooperative Localization, ''
Proceedings of the IEEE 20th International Intelligent Transportation Systems Conference (ITSC), Yokohama, Japan, October 16-19, 2017.
|
Abstract — Cooperative map matching (CMM) uses the Global Navigation Satellite System (GNSS) positioning of a group of vehicles to improve the standalone localization accuracy. It has been shown to reduce GNSS error from several meters
to sub-meter level by matching the biased GNSS positioning of four vehicles to a digital map with road constraints in our previous work. While further error reduction is expected by increasing the number of participating vehicles, fundamental questions
on how the vehicle membership of the CMM affects the performance of the GNSS-based localization results need to be addressed to provide guidelines for design and optimization of the vehicle network. The quantitative relationship between the estimation
error and the road constraints has to be systematically investigated to provide insights. In this work, a theoretical study is presented that aims at developing a framework for quantitatively evaluating effects of the road constraints on the CMM
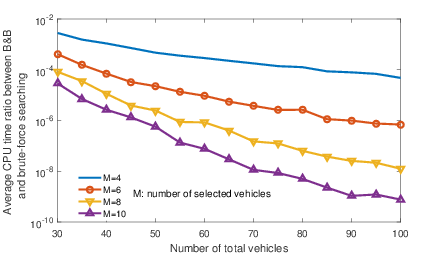
accuracy and for eventual optimization of the CMM network. More specifically, a closed form expression of the CMM error in terms of the road angles and GNSS error is first derived based on a simple CMM rule. Then a Branch and Bound algorithm and
a Cross Entropy method are developed to minimize this error by selecting the optimal group of vehicles under two different assumptions about the GNSS error variance.
Interpenetrating Cooperative Localization
 Huajing Zhao, Zhaobin Mo, Macheng Shen, Jing Sun, Ding Zhao, ''Interpenetrating Cooperative Localization in Dynamic Connected Vehicle Networks,''
IEEE Transactions on Intelligent Vehicles, 2017. |
Macheng Shen, Huajing Zhao, Jing Sun, Ding Zhao, ''Semi-Interpenetrating Cooperative Localization in Connected Vehicle Networks, ''
IEEE International Conference on Robotics and Automation (ICRA), Brisbane, May 21-25,2018.
|
Huajing Zhao, Zhaobin Mo, Macheng Shen, Jing Sun, Ding Zhao, ''Interpenetrating Cooperative Localization in Dynamic Connected Vehicle Networks,''
IEEE Transactions on Intelligent Vehicles, 2017. |
Macheng Shen, Huajing Zhao, Jing Sun, Ding Zhao, ''Semi-Interpenetrating Cooperative Localization in Connected Vehicle Networks, ''
IEEE International Conference on Robotics and Automation (ICRA), Brisbane, May 21-25,2018.
|
Abstract — We proposed a fusion mechanism for the distributed cooperative map matching (CMM) within the vehicular ad-hoc network. This mechanism makes the information from each node reachable within the network by other nodes without
direct communication, thus improving the overall localization accuracy and robustness. Each node runs a Rao-Blackwellized particle filter (RBPF) that processes the Global Navigation Satellite System (GNSS) measurements of its own and its neighbors,
followed by a map matching step that reduces or eliminates the GNSS atmospheric error. Then each node fuses its own filtered results with those from its neighbors for a better estimation. In this work, the complicated dynamics and fusion mechanics
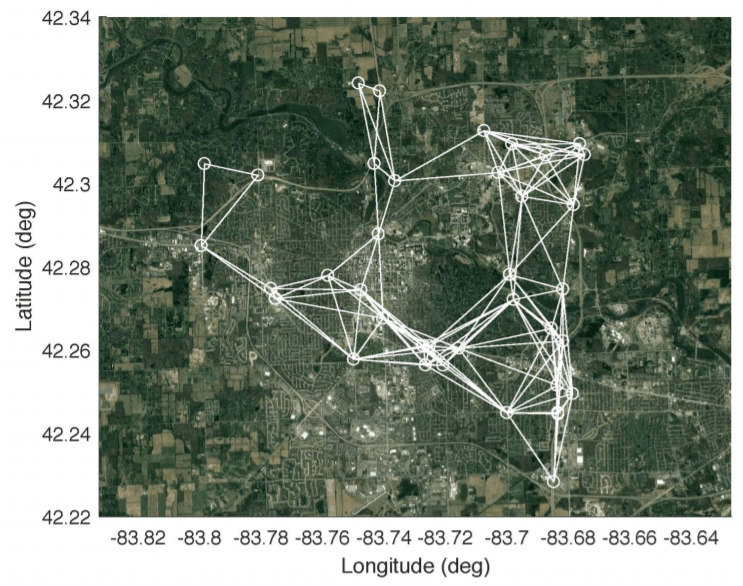
of these RBPFs are represented by a linear dynamical system. We proposed a distributed optimization framework that explores the model to improve both robustness and accuracy of the distributed CMM. The effectiveness of this distributed optimization
framework is illustrated by simulation results on realistic vehicular networks drawn from data, compared with the centralized one and a decentralized one with random fusion weights.