|
Current Rover Status Sol 12 Today the Sojourner traversed from Yogi to a prospective soil experiment site after successfully acquiring a spectrum from Yogi. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Sol 11
Today the Sojourner successfully returned spectral data from the rock dubbed 'Yogi'. The Rover will remain at this vicinity until the quality of the spectrum can be confirmed. The vehicle remains in good health. Newest Rover "Movie" (15 July 1997)! |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Sol 10
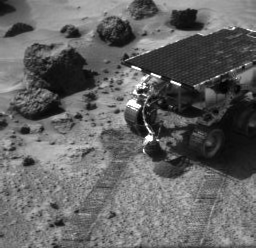
Today the Sojourner was directed by the Rover Driving/Uplink team to place the Alpha Proton X-ray Spectrometer on the rock dubbed 'Yogi'. This manuever was performed successfully with two of the three APXS contact sensors active indicating a virtual bulls-eye on the target rock. The Rover remains in good health. Tomorrow's downlinked data is hoped to contain the spectral data of 'Yogi' which may possibly yield new information on the geology of Mars. Summary of Planned Rover Activities for Sol 10:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Sol 9
Commands for the next day of activities for Mars Pathfinder were not sent last night because the Pathfinder spacecraft's receiver had not been turned on in advance of the uplink session. NASA's Deep Space Network conducts a routine frequency sweep before uplink sessions each day. The Goldstone, CA station initiated this sweep yesterday at about 1:35 p.m. PDT, when it came online. Because Pathfinder's receiver is only turned on at specific times each day to conserve power, it was not scheduled to be turned on until 1:46 p.m., an 11-minute miscalculation. Therefore the planned command link to the spacecraft was not established. The operations team did not discover the problem until it was ready to begin its downlink session at 9:12 p.m. PDT last night. That 30-minute downlink would have been followed by a later downlink of data at 10:30 p.m. to 12:20 a.m. The lost transmission session did not impact the mission in any way, except to delay the rover and lander activities. The operations team will retransmit the same set of sequences tonight during the 8 p.m. PDT session. Activities planned for today will repeat the tasks not completed yesterday, including backing Sojourner down from Yogi and repositioning its science instrument against the rock. A full color panorama is also planned. Meanwhile, all spacecraft and rover systems are performing well. Today is Sol 8 of the Mars Pathfinder mission. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
Newest Rover "movie" (10 July 1997)! |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Summary of Planned Rover Activities for Sol 4:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
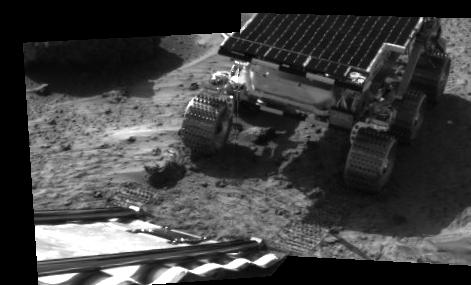
Success!
"Six wheels on soil!" The above image was taken by the IMP camera on July 5, 1997. Sojourner's descent down the rear rover deployment ramp was successful. The microrover's seven month journey from Earth to Mars is complete. The soil beneath Sojourner (with tracks showing behind the right rear wheel) will be the first target of the Alpha Proton X-Ray Spectrometer. Animation of the Rover rolling onto the surface of Mars! |