Robotic Ankle-Foot Prosthesis Emulator - Schematic
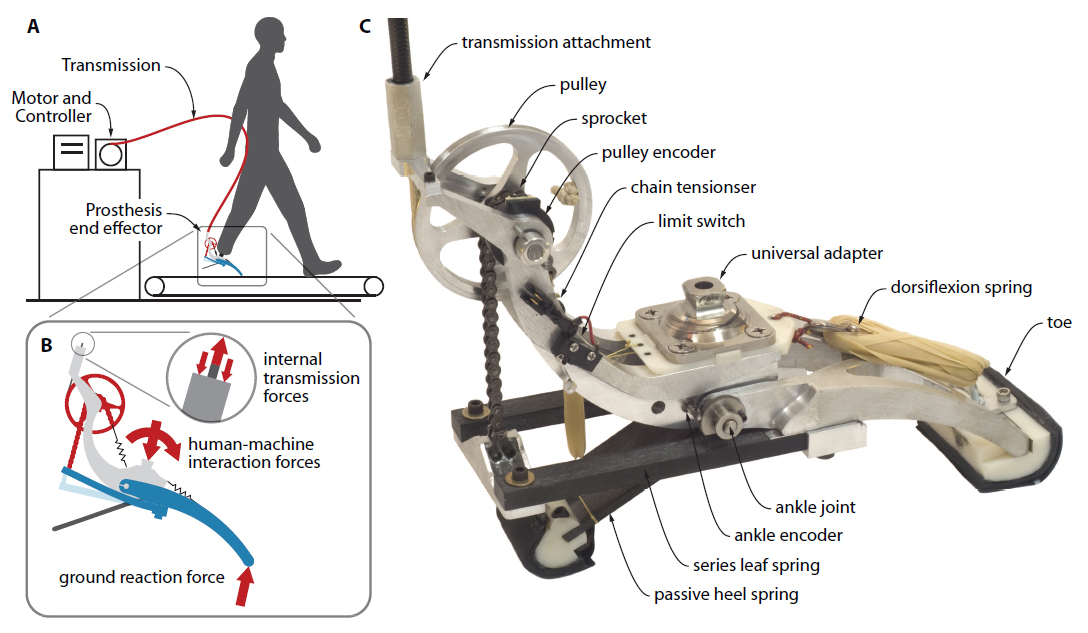
Illustration and schematic of the robotic ankle-foot prosthesis emulator system. A The system comprises three elements: (1) powerful off-board motor and control hardware, (2) a flexible tether transmitting mechanical power and sensor signals, and (3) a lightweight instrumented end-effector. This division of components was chosen to maximize responsiveness and minimize end-effector mass during treadmill walking. B Free-body diagram of the end effector. Internal Bowden cable transmission forces pull the synthetic rope upwards while equally and oppositely pushing the aluminum frame downwards. Rope tension is transmitted through the pulley, sprocket, chain, and leaf spring, giving rise to a ground reaction force at the toe. The effect is equivalent to ankle plantarflexion torque, resulting in a reaction force and moment at the interface with the human user. C Photograph of the instrumented prosthesis. A pulley-sprocket component magnifies transmission forces and allows direct measurement of spring deflection. A tensioning spring keeps the chain engaged. A limit switch protects against excessive plantarflexion. A universal adapter attaches to the socket or prosthesis simulator worn by the user. A dorsiflexion spring comprised of rubber bands retracts the toe, e.g. during leg swing. Fiberglass leaf springs provide series elasticity for ankle torque measurement and control. A separate leaf spring directly connected to the frame (not the toe) comprises the heel. Developed by Steve Collins and Josh Caputo at the Experimental Biomechatronics Lab at Carnegie Mellon University. Illustration and schematic by Steve Collins.
Robotic Ankle-Foot Prosthesis Emulator - Laboratory Photo
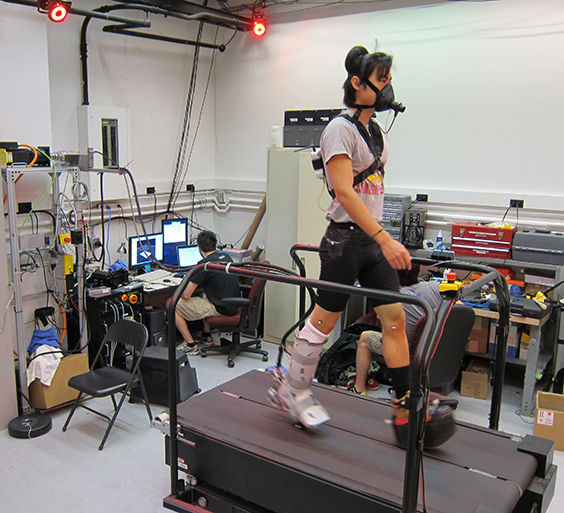
Photograph of the emulator system in a gait laboratory. The AC servomotor and control hardware are visible at left. In this data collection, the subject walks on an instrumented split-belt treadmill, while body motions are tracked by a reflective marker and camera system, and whole-body energetic cost is measured through a respirometry system that utilizes a mask. Please see the attached articles for details. Developed by Steve Collins and Josh Caputo at the Experimental Biomechatronics Lab at Carnegie Mellon University. Photograph by Steve Collins.
Robotic Ankle-Foot Prosthesis Emulator - Amputee Fitting
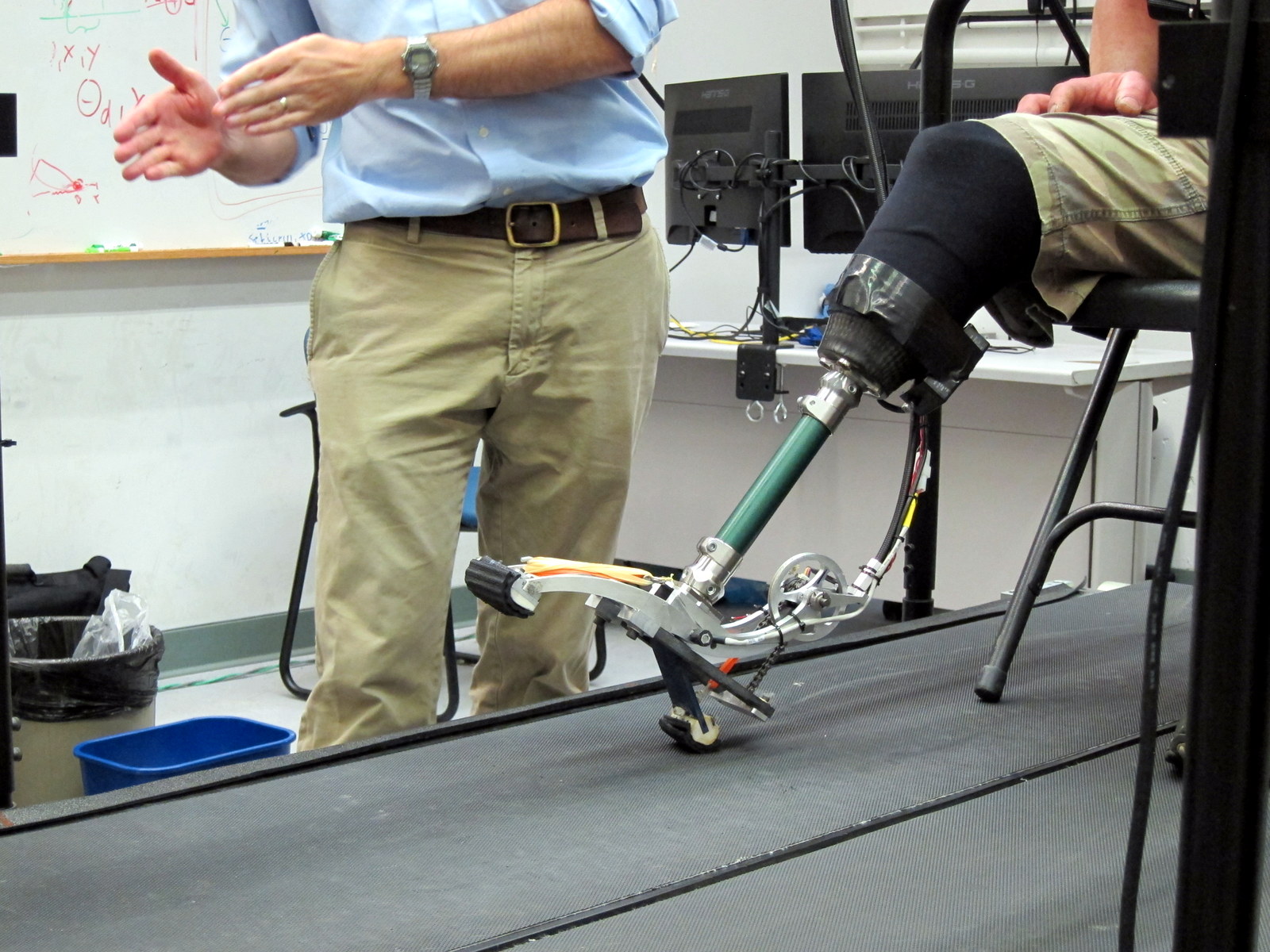
Photograph during fitting of an individual with trans-tibial amputation. The experimenter is inquiring about the degree of external rotation in the pylon adapters. Device developed by Steve Collins and Josh Caputo at the Experimental Biomechatronics Lab at Carnegie Mellon University. Photograph by Roberto Quesada.