Passive-Dynamic Walking Robot - Photos
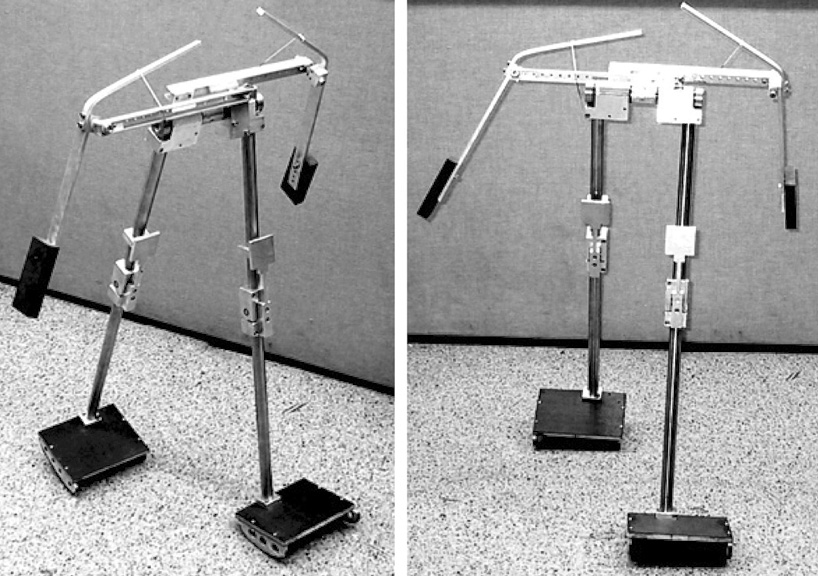
Photographs of the Passive-Dynamic Walking Robot.
The machine has two legs, knees, arms
and shaped feet, but no motors.Developed by Steve Collins, Martijn Wisse, and Andy Ruina at Cornell University.
See attached articles for details. Photographs by Steve Collins.

The Passive-Dynamic Walking Robot Mid-Stride.
Driven by the natural interactions between the
body segments and gravity, this machine walks down a shallow incline.
Images capture the moment just preceding knee strike (left) and just before heel strike (right).
See attached articles for details. Photographs by Hank Morgan.
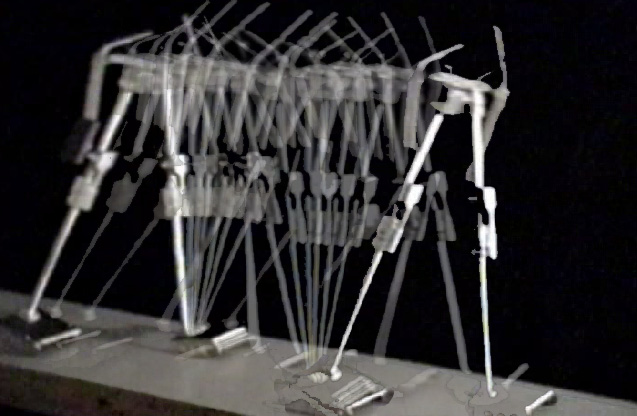
Strobed Rendering of the Passive Robot Walking. Each ghosted image represents a frame from a video taken of the machine as it walked normally. Images were then filtered to improve clarity. Image by Steve Collins.