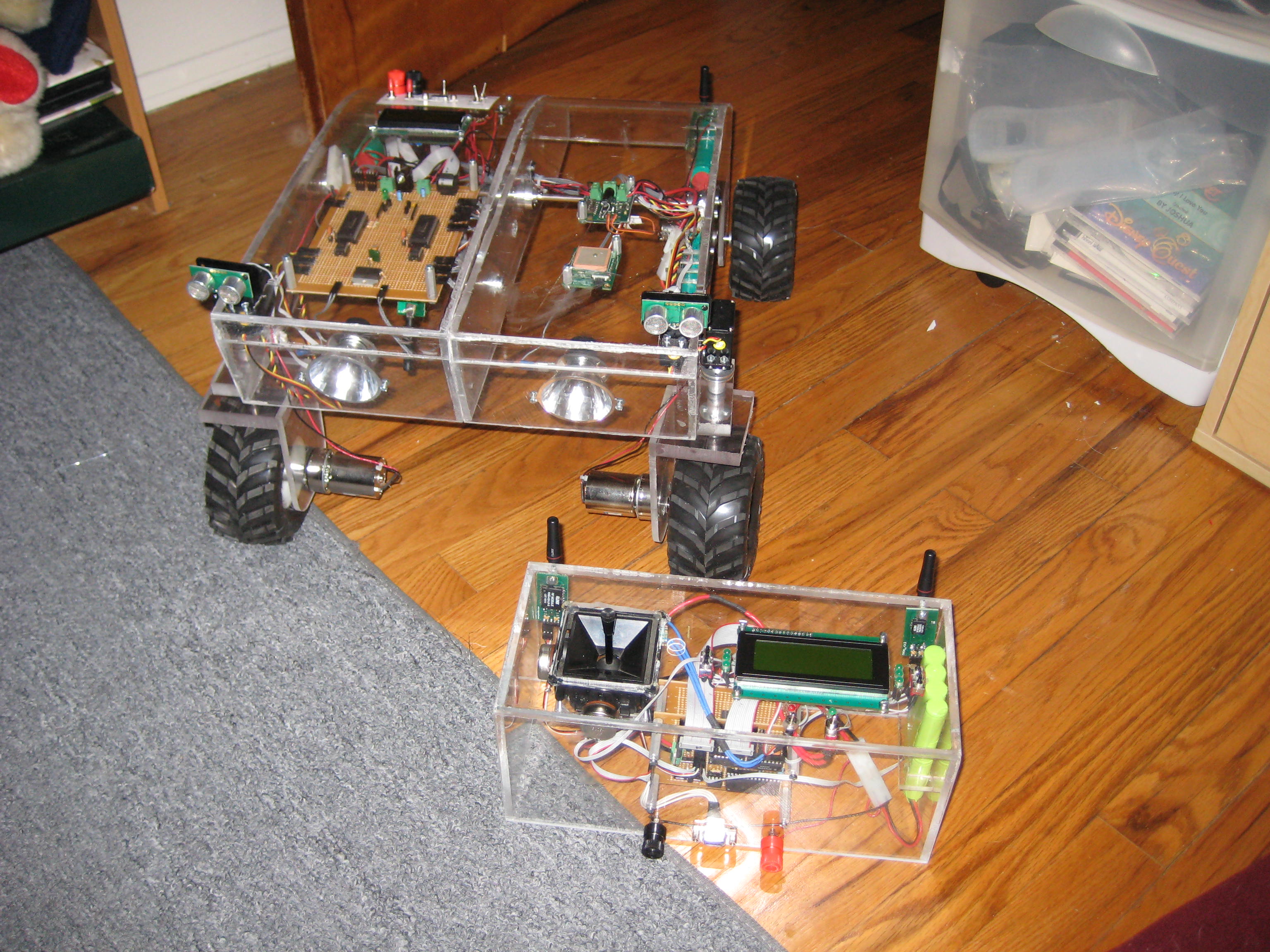
The purpose behind this robot was to have something autonomously navigate uneven terrain. It is a 4WD vehicle with independent steering on the front wheels which allows it to turn on center as well as mimicking a cars turning method. In order to give it more flexibility on uneven terrain, the robot is split down the center with an axel running through the two half's. This allows it to climb over objects while keeping all four wheels on the ground.
Two ultrasound distance sensors are placed on servos on the front corner to help avoid objects. These two sensors have a dedicated Basic Stamp for optimize the speed at which it takes reading. Another Basic Stamp is used to interpret all of the data and move the motors accordingly. It also uses a light sensor to turn on its headlights when it gets too dark.
Another important feature of this robot is its remote control. Some of the things that can be done with the remote are turning the lights on, and off. Adjust the light sensors threshold level. Obviously it can drive the robot. It does this using an RF-transmitter, and multiple inputs including its joystick and an accelerometer. This allows you to tilt the remote in order to drive it just like your using a Wii remote.