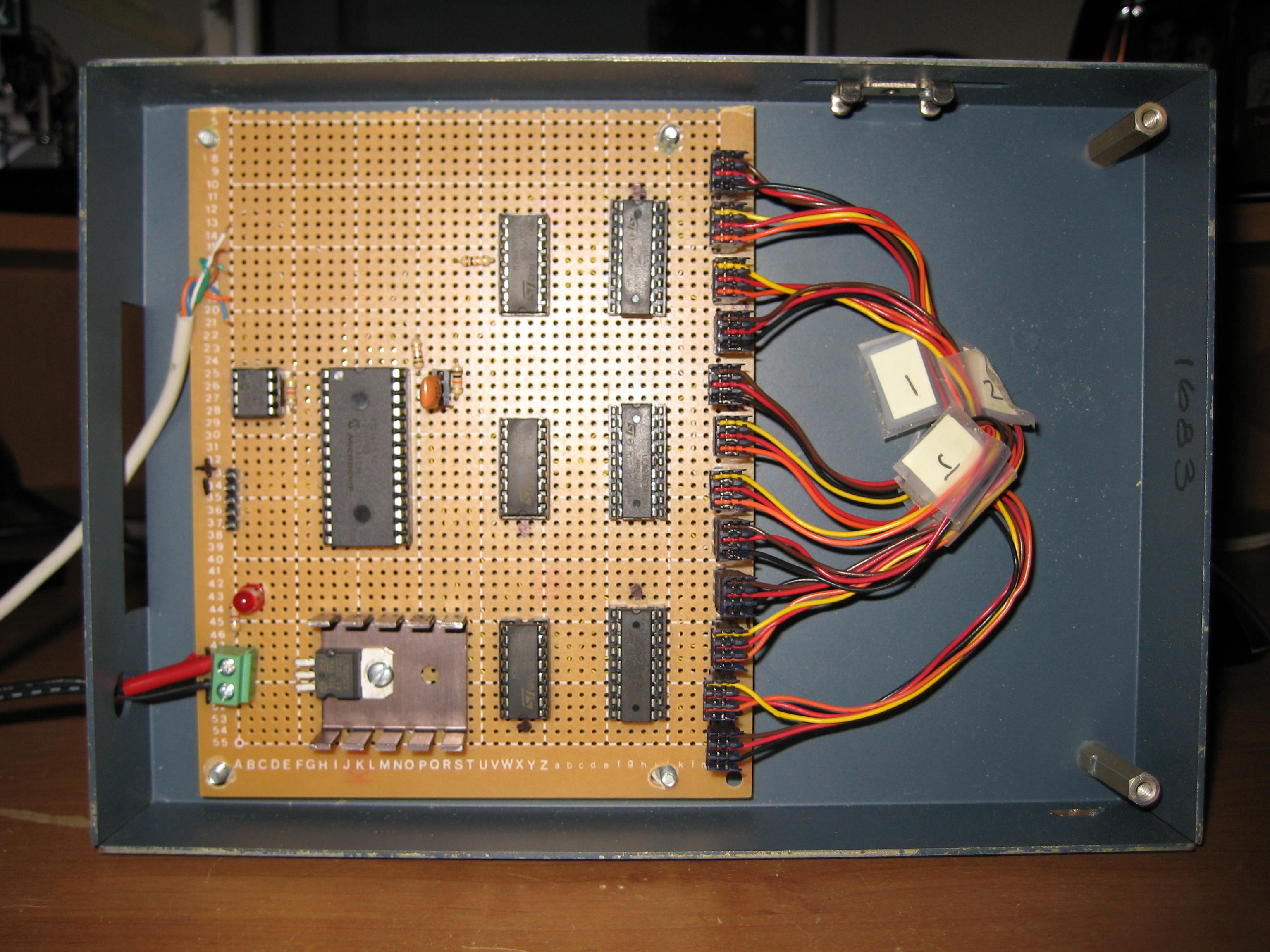
When I came upon this 1980's robotic arm, with an outdated control system, I figured I could build it a new one. The robot came equipped with 6 uni-polar stepper motors. I built a simple push button remote, utilizing a couple parallel-to-serial shift registers to save on I/O pins. The motors are driven by Darlington arrays triggered by serial-to-parallel shift registers. The microcontroller simply reads in the buttons, decides which motors to move and drives the motors accordingly.