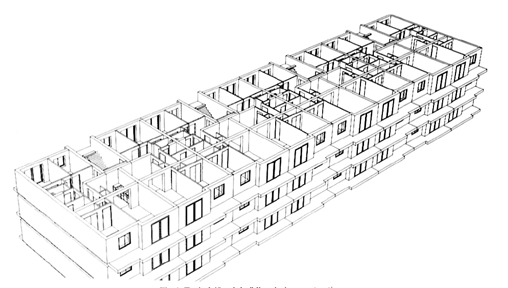
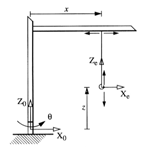
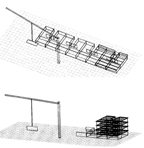
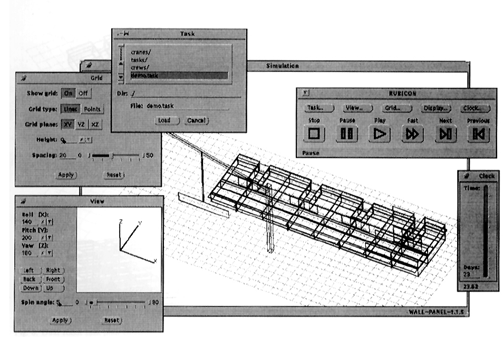
In collaboration with Irving Oppenheim, Stephen Lee, and Rudi Stouffs The work was funded by the Japan Research Institute. objective Was to evaluate the feasibility and productivity of robot agents in construction. We specified a general representation for robots in building construction that uniformly characterizes a wide variety of automated agents, using motion rules as a means of establishing the configuration of an agent at any given time. We developed a motion language to describe the behavior of automated agents in a dynamically changing environment and in cooperation with human labor crews. We implemented a rule based simulation program for robot assisted assembly of panelized constructions with particular reference to rule–based checking and generation of robot paths for the avoidance of spatial interference.
publications
Rudi Stouffs, Ramesh Krishnamurti and Irving J Oppenheim (1995)
A behavioral language for motion planning in building construction, Automation in Construction, 3, 305-320.
R Stouffs, R Krishnamurti, S Lee, and Irving J Oppenheim (1994) Construction process simulation with rule-based robot planning, Automation in Construction, 3, 79-86.
Rudi Stouffs, Stephen Lee, Ramesh Krishnamurti, and Irving J Oppenheim (1993) Representing robots for building construction simulation, in A. Delsante, J. Mitchell and R. Van de Perre (eds.), Building Simulation'93, pp. 533-539, International Building Performance Simulation Association (IBPSA), Ghent, Belgium.
Stouffs, R., Krishnamurti, R., Lee, S., and Oppenheim, I. (1993) Construction process simulation with rule-based robot planning, in G. Watson, R. Tucker and J. Walters (eds.) Automation and Robotics in Construction X pp. 495-502, Elsevier Science, Amsterdam.
ramesh krishnamurti, rudi stouffs, irving oppenheim, stephen lee ©, January 2011 |