
RESEARCH PROJECTS
My research interests are in the area of computer networks with a
special focus on wireless networks and mobile systems. Recent years
have witnessed an explosive growth in wireless connectivity, enabling
a host of new applications and services. My research designs and
builds new wireless technologies that provide faster connectivity to
our existing devices, connect previously unconnected objects to the
Internet and provide novel services as a result. My research has made
three broad contributions:
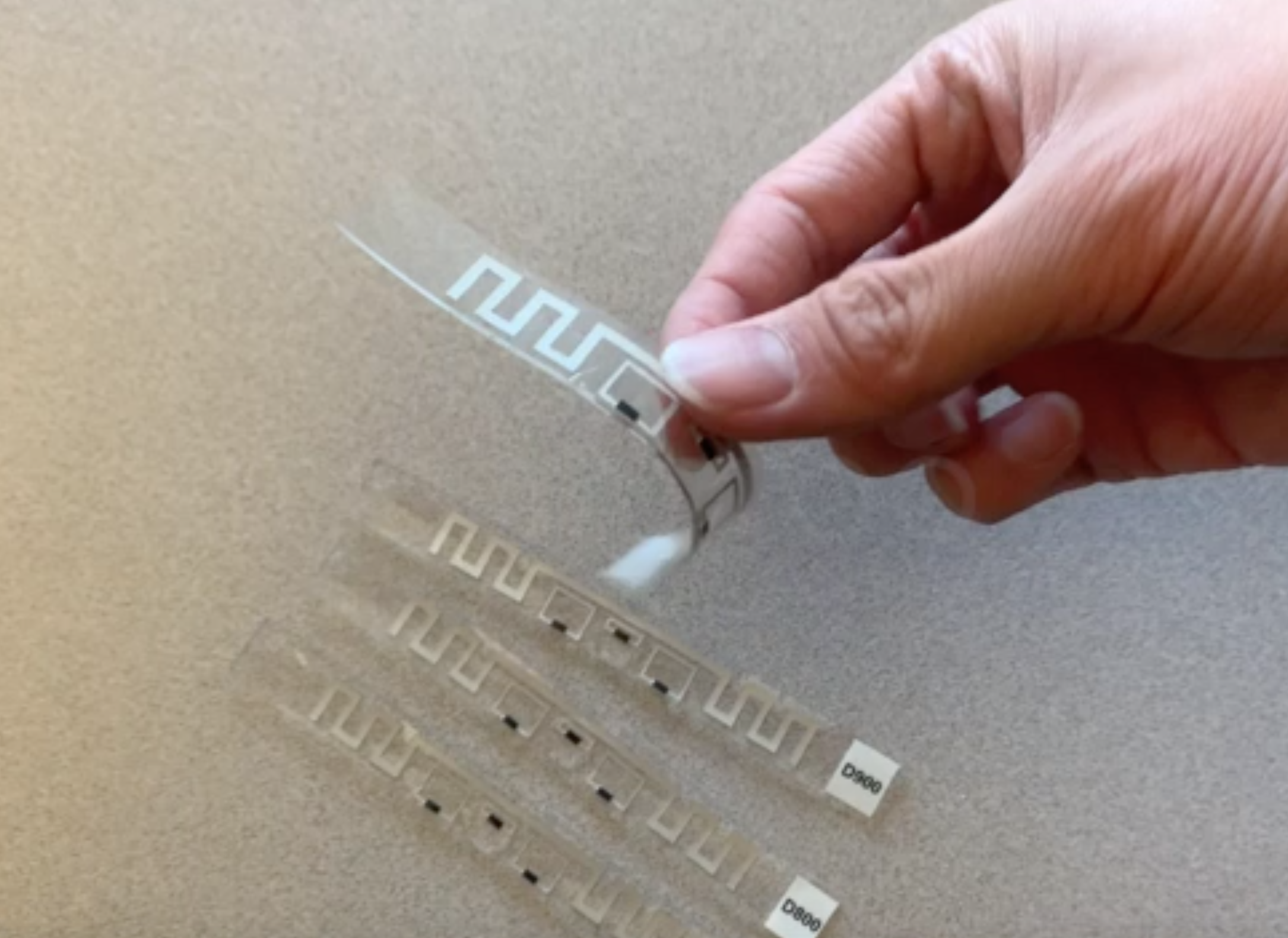
Connecting the Internet of Things
Imagine if every object that surrounds you is wirelessly
connected. My research explores: what would such a network look like?
Specifically, we need systems that scale to a large number of
connected devices, are self-configurable and secure. Most importantly,
their battery needs to last for years, or perhaps they must operate
with no battery at all. My research explores both these
alternatives:

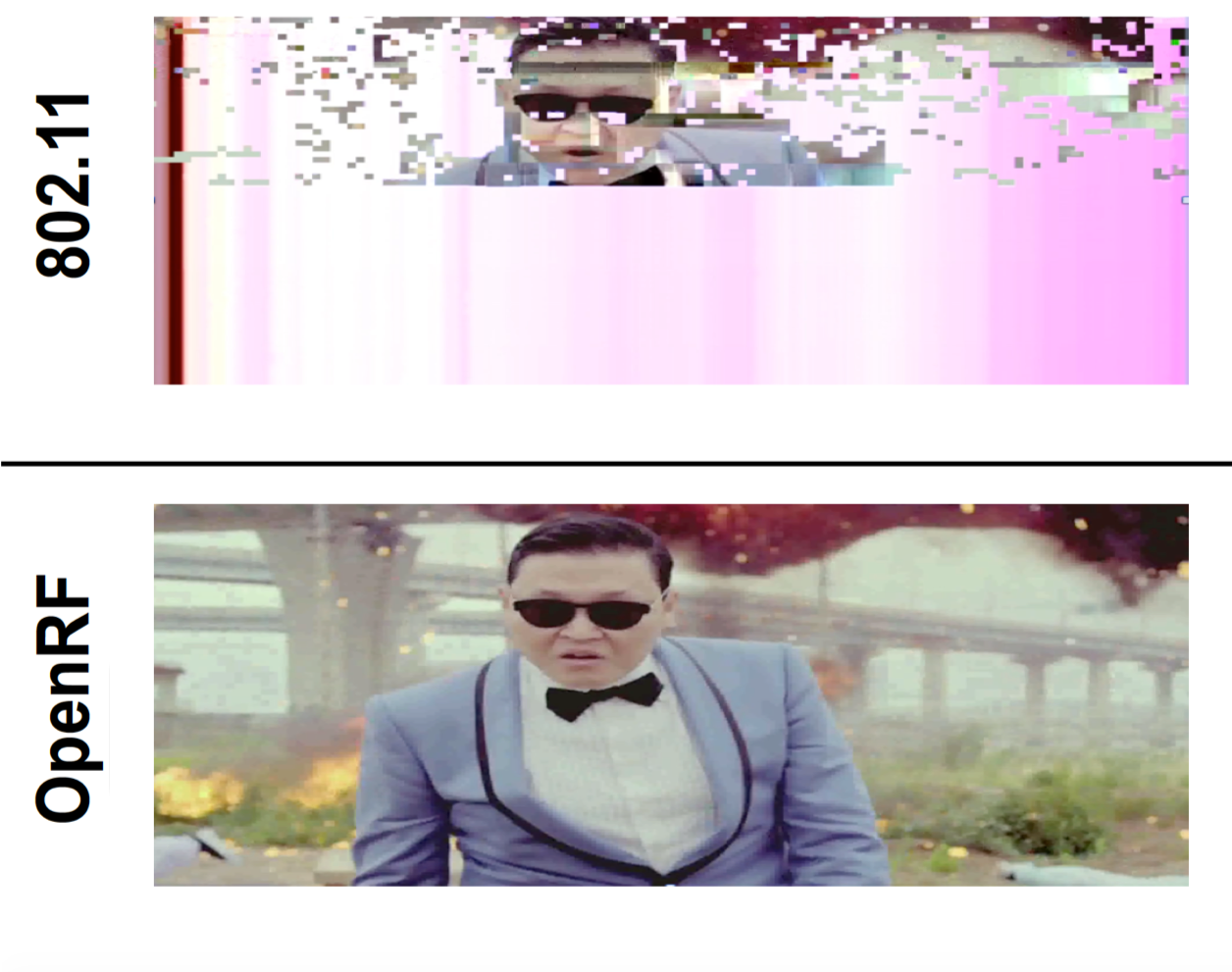
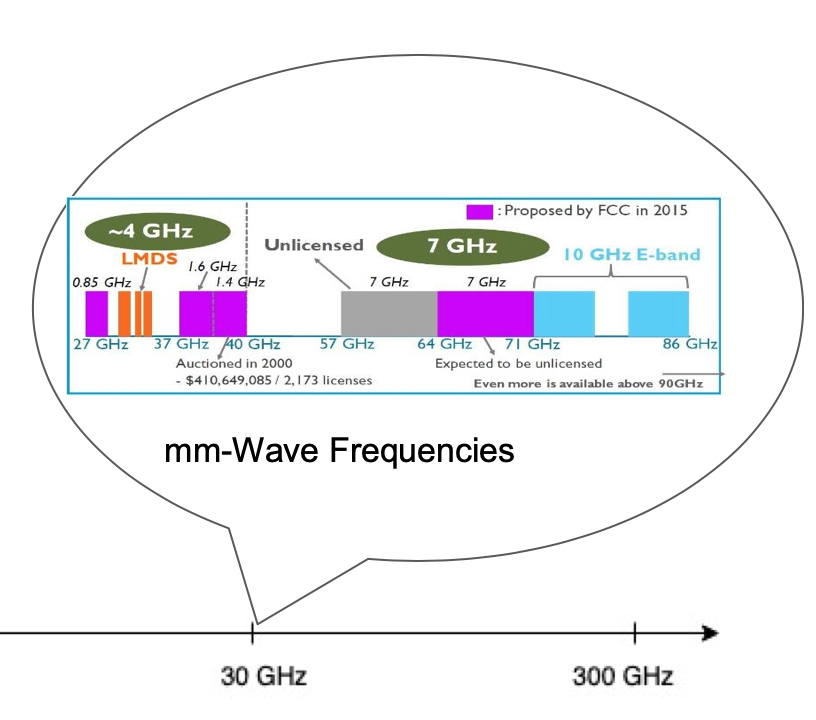
Next-Generation Wireless Connectivity
What would be the wireless technologies that connects
smartphones and wireless devices of the future to Internet to be
ten-fold faster than possible today? How would such a system scale
with many wireless devices sharing the same spectrum? My research
explores next-generation wireless technologies to mitigate
interference in wireless LANs and better configure cellular networks
of today, as well as emerging technologies of the future such as
mm-wave. My work spans both Wi-Fi and cellular networks beyond 5-G.
Novel Wireless Services
My research explores novel services that are enabled by
next-generation wireless speeds and connectivity to objects around
us. Specifically, we study if wireless communication radios can be
re-used as a sensing mechanism. For instance, can wireless radios help
us track our location, even if we are indoors, where GPS fails? Can
wireless signals help us track our own body and sense the environment
around us? My research also studies the security and privacy
implications of such future wireless networks and services.

