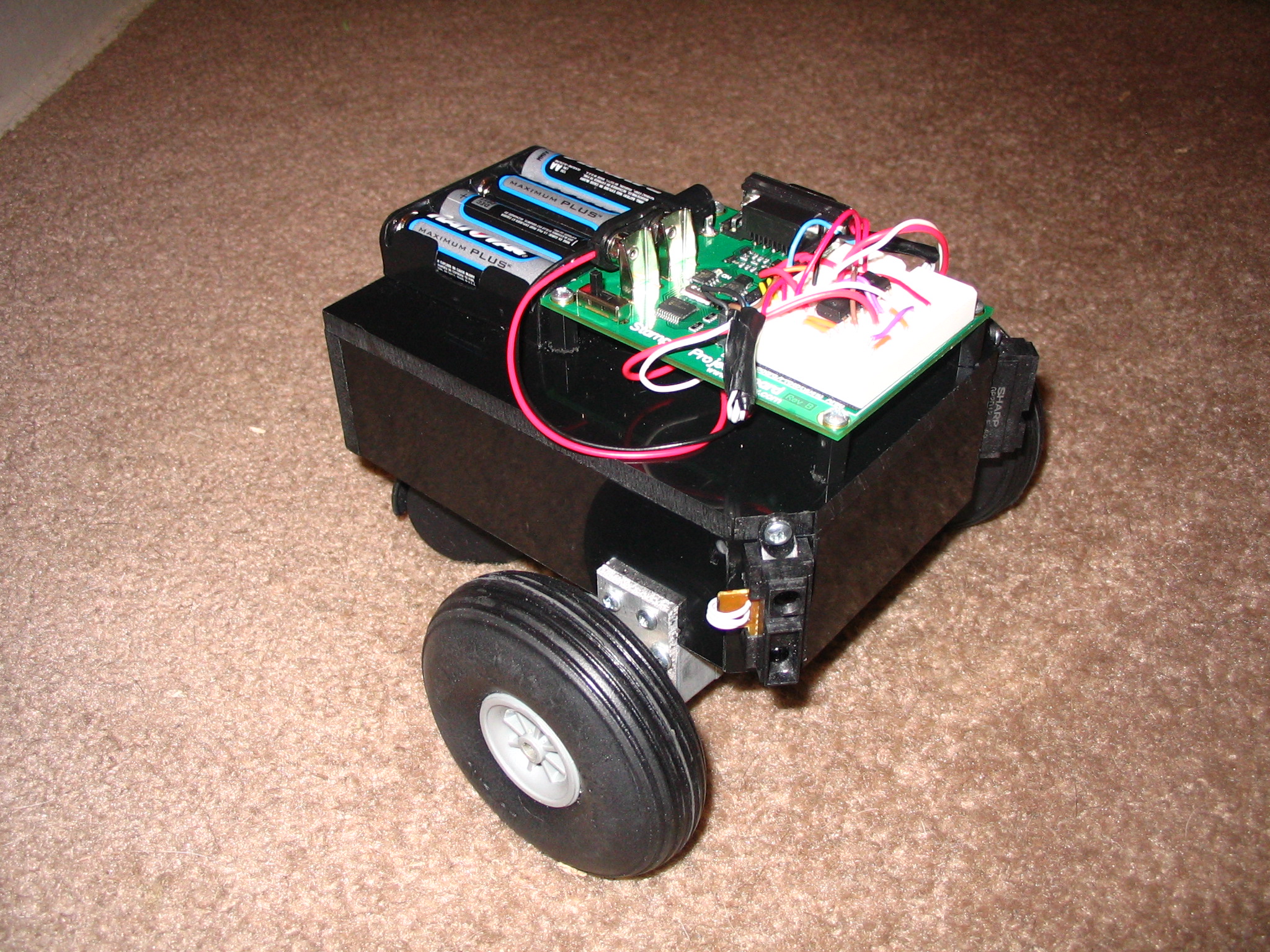
This is just a small autonomous robot I built as a present to my mother. It uses two sharp infrared sensors on the corners of the robot to avoid the walls. It runs off a Basic Stamp 1, with a very simple algorithm.
December 2008 update:
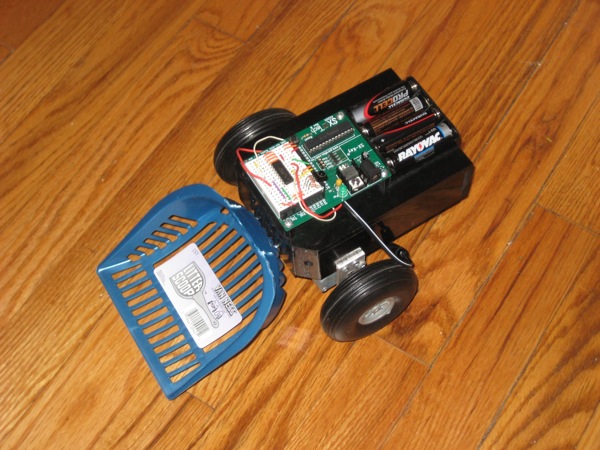
since I started building robots my sister has wanted a little robot to clean up after her cats. So I bolted on a scoop, an SX-28, and an IR receiver so it can be driven around using a TV remote.