As you can see, it's not really a grasshopper robot, it's just green, and looks like a bug, so now it's called the grasshopper.
When thinking about how I wanted to design this robot, I had a few key things I wanted to incorporate. I wanted it to be a very simple to design and recreate. I also wanted it to be very appealing to others. When demonstrating some of my robots at various events, sometimes people get more excited about a small, cheap robot that they feel they may be able to build. Rather then a large complicated robot.
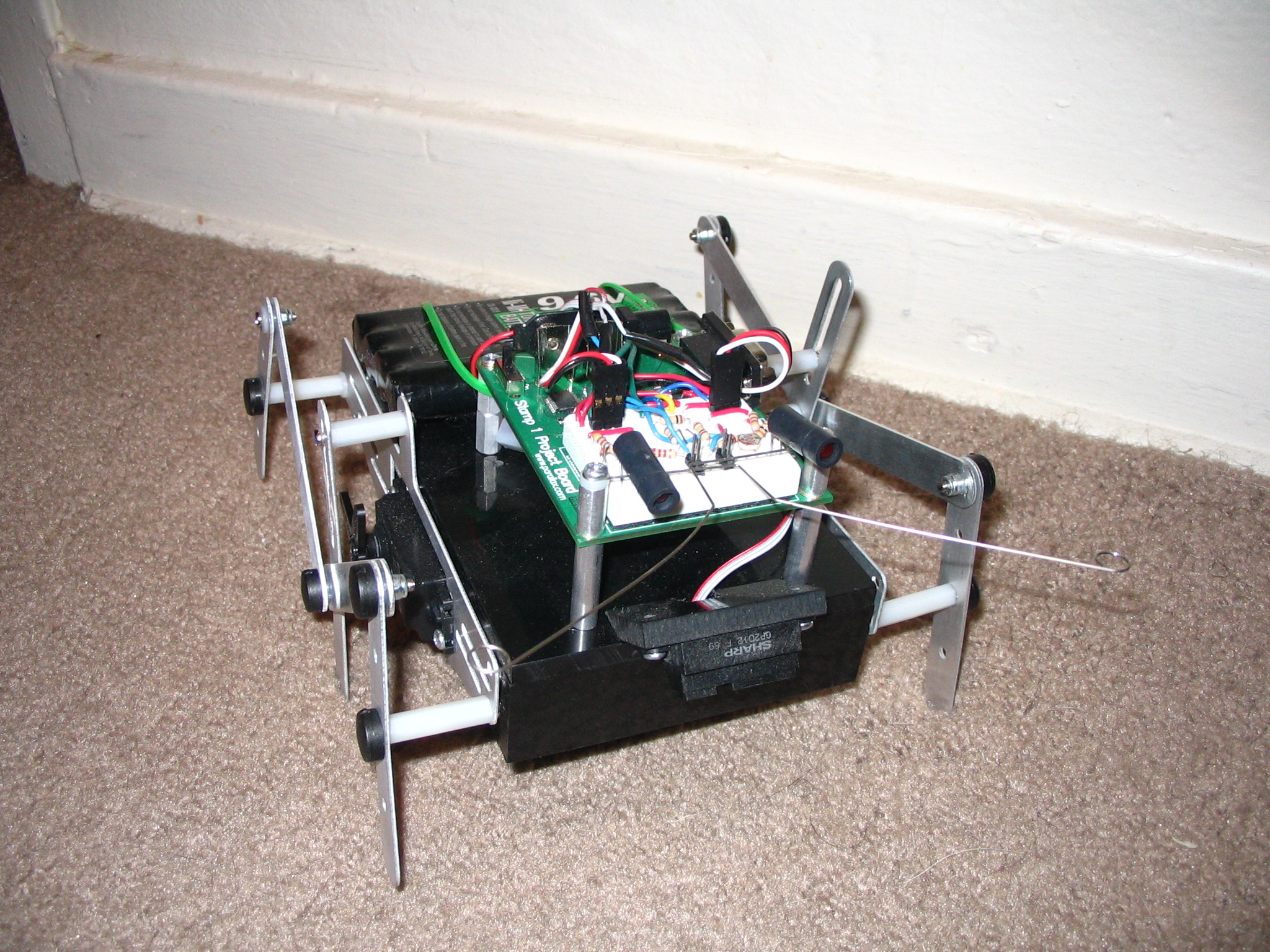
Some of the key features of this robot are:
- Runs on a Basic Stamp 1
- Whiskers obtained from my Boe-Bot Kit
- Its legs are a kit intended to be attached to the Boe-Bot
- Infrared rangefinder looking down
- Two photocells
The program is very simple and straight forward. While walking forward the robot checks its various sensors. If one of the whiskers gets hit, it will back up and turn away from the obstruction. If the IR sensor sees that there is not a floor beneath the robot, it then backs up and does a 180 degree turn. If one of the photocells sees that it is significantly darker then the other, it will back up and turn away (Incase someone tries to squash him!).