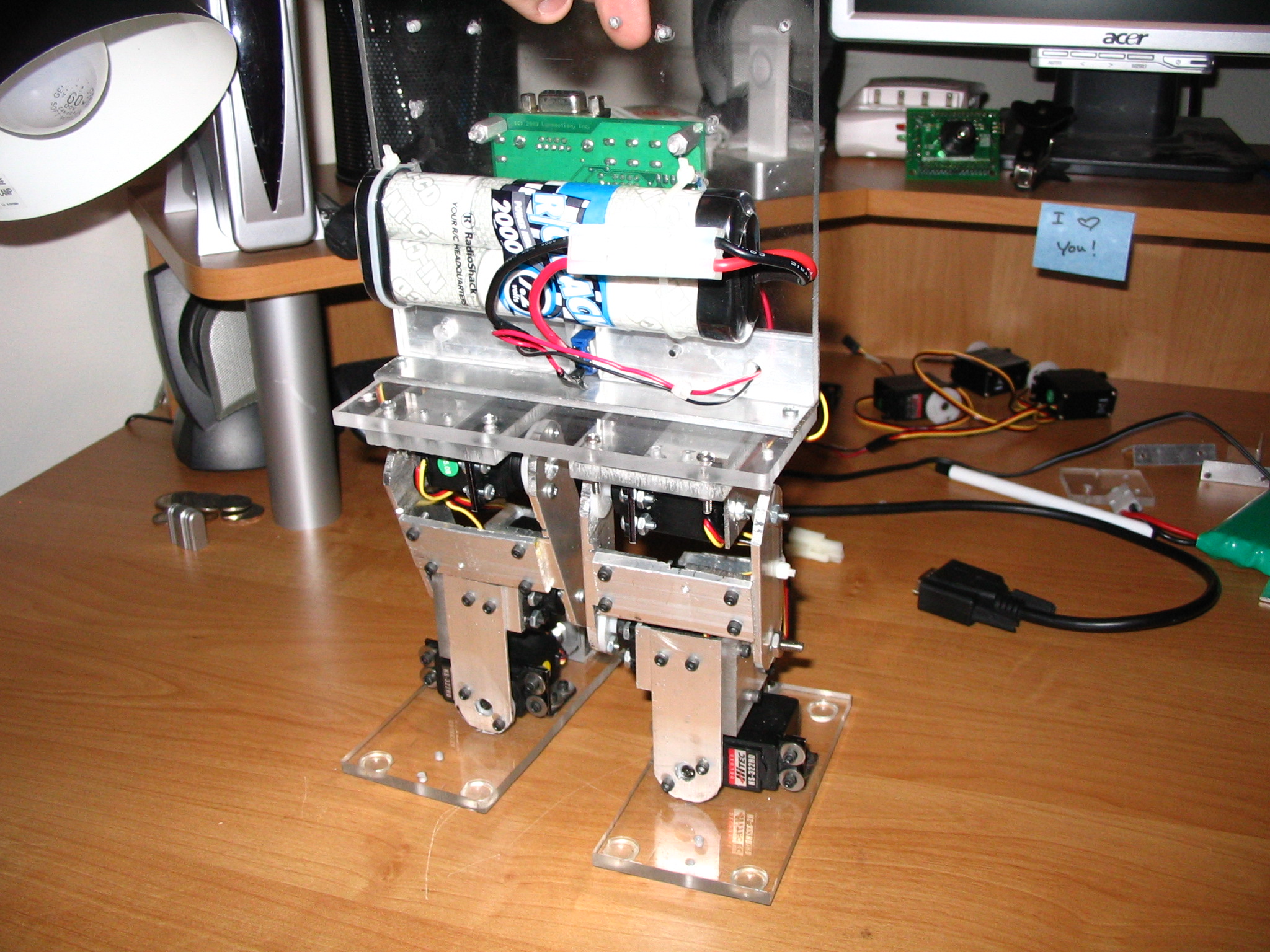
Like many people, I wanted to build a humanoid robot. The first major step in building a humanoid is a 2-legged walking robot. So I built a 5 degree of freedom per leg robot. But just like many people before me realized, it is very difficult to program a pair of legs that complicated. So I simplified it down to a 3 servo per leg walker. One servo at the hip, one at the knee, and one at the ankle to shift its weight onto one leg.
While working on the walking algorithm I got a little frustrated after my robot kept tipping over, so I came up with the idea to have my robot to the hokey pokey. So I spent a few hours programming the routine into the microcontroller and it even has a speaker on the back that beeps a long with it as it dances. The video attached is one that I synced to an mp3 of the Wiggles singing the hokey pokey song.
Since shooting this video I did complete the walking algorithm, people just seem to be more impressed with a dancing robot then a walking one.