Return to lecture notes index
January 19, 2012 (Lecture 2)
The Area We Call "Systems" -- And the Funny Creatures We Call "Systems People"
When I'm hanging out in the "Real world", people often ask me about my job.
I usually explain that I am a teacher. Everyone understands what a teacher
does. We talk for a living. Beyond that, I'm safe. Everyone knows, "Those
who can, do. Those who can't, teach."
When people ask me what I teach, I tell them, "Computer Science". Oddly
enough, they only hear the first word, "Computer". Sorry, ya'll, I don't do
windows. You'll need IT for that. This brings me to two questions,
"What is the area we call, Comptuer Systems?" and, "How does Distributed
Systems fit in?"
When I explain my area of interest to every day folks, I like to tell them
that in "Systems" we view the computing landscape as commerce from the
perspective of the air traffic system or the system of highways and roadways.
There is a bunch of work that needs to get done, a bunch of resources that
need to be used to get it done, and a whole lot of management to make it
work.
And, like our view of commerce, it only gets interesting when it
scales to reach scarcity and when bad things happen. The world can't be
accurately descibed in terms of driveways, lemonaide stands, and sunny days.
Instead, we care about how our roadways and airways perform during rush hour,
in the rain, when there is a big game, and, by the way, bad things happen to
otherwise good drivers along the way. In otherwords, our problem space
is characterized by scarcity, failure, interaction, and scale.
Distributed Systems, In Particular
"Systems people" come in all shapes and sizes. They are interested in such
problems as operating systems, networks, databases, and distributed systems.
This semester, we are focusing mostly on "Distributed systems", though
we'll touch on some areas of networks, and monolithic databases and
operating systems.
Distributed systems occur when the execution of user work involved
managing state which is connected somewhat weakly. In other words,
distributed systems generally involve organizing resources connected
via a network that has more latency, less bandwidth, and/or a higher
error rate than can be safely ignored.
This is a different class of problems, for example, than when the limiting
factors might include processing, storage, memory, or other units of work.
There is tremendous complexity in scheduling process to make efficient use
of scarce processors, managing virtual memory, or processing information
from large attached data stores, as might occur in monolithic operating
systems or databases. It is also a different class of problems than managing
the fabric, itself, as is the case with networks.
Exploring the Model
When I've taught Operating Systems, I've begun with a picture
that looks like the one below. If you didn't take OS, please don't
worry -- everything on the picture, almost, should be familiar to
you. It contains the insides of a computer: memory and memory
controllers, storage devices and their controllers, processors, and
the bus that ties them all together.
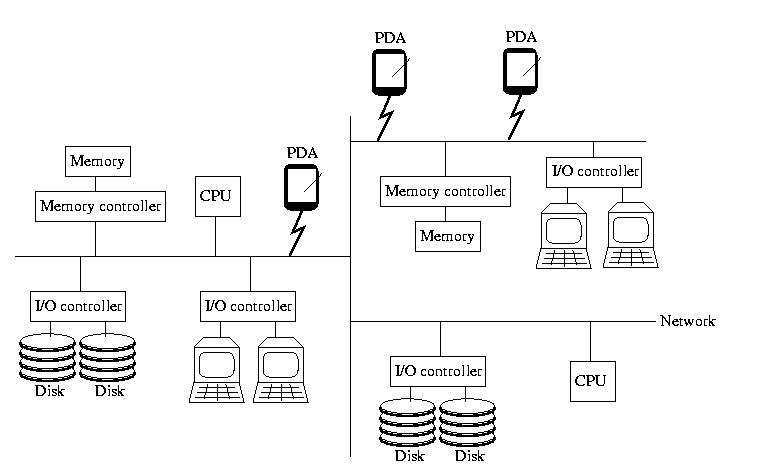
This time however, the bus isn't magical. It isn't a fast, reliable,
predictable communication channel called that always works and maintains
a low latency and high bandwidth. Instead, it is a simple, cheap,
far-reaching commodity network that may become slow and bogged down
and/or lose things outright. It might become partitions. And, it might
not deliver messages in the same order that they were sent.
To reinforce the idea that this is a commodity network, like the
Internet, I added a few PDAs to the picture this time. Remember,
the network isn't necessarily wired -- and all of the components
aren't necessarily of the same type.
Furthermore, there is no global clock or hardware support for
synchronization. And, to make things worse, thr processors aren't
necessarily reliable, and nor is the RAM or anything else. For
those that are familiar with them, snoopy caches aren't practical,
either.
In other words, all of the components are independent, unreliable
devices connected by an unreliable, slow, narrow, and disorganized
network.
What's the Good News?
The bottom line is that, despite the failure, uncertainty, and
lack of specialized hardware support, we can build and effectively
use systems that are an order of magnitude more powerful. In fact we can
do this while providing a more available, more robust, more convenient
solution. This semester, we'll learn how.
Distributed Systems vs. Parallel Systems
Often we hear the terms "Distributed System" and "Parallel System."
What is the difference?
Not a whole lot and a tremendous amount -- all at the same time.
"Distributed System" often refers to a systems that is to be used by
multiple (distributed) users. "Parallel System" often has the connotation
of a system that is designed to have only a single user or user process.
Along the same lines, we often hear about "Parallel Systems" for
scientific applications, but "Distributed Systems" in e-commerce or
business applications.
"Distributed Systems" generally refer to a cooperative work environment,
whereas "Parallel Systems" typically refer to an environment designed to
provide the maximum parallelization and speed-up for a single task.
But from a technology perspective, there is very little distinction.
Does that suggest that they are the same? Well, not exactly. There are
some differences. Security, for example, is much more of a concern in
"Distributed Systems" than in "Parallel Systems". If the only goal of
a super computer is to rapidly solve a complex task, it can be locked
in a secure facility, physically and logically inaccessible -- security
problem solved. This is not an option, for example, in the design of
a distributed database for e-commerce. By its very nature, this system
must be accessible to the real world -- and as a consequence must
be designed with security in mind.
Abstraction
We'll hear about many abstractions this semester -- we'll spend a great
deal of time discussing various abstractions and how to model them in
software. So what is an abstraction?
An abstraction is a representation of something that incorporates the
essential or relevent properties, while neglecting the irrelevant details.
Throughout this semester, we'll often consider something that exists in the
real world and then distill it to those properties that areof concern to us.
We'll often then take those properties and represent them as data structures
and algorithms that that represent the "real world" items within our software
systems.
The Task
The first abstraction that we'll consider is arguably the most important
-- a represention of the work that the system will do on behalf of a
user (or, perhpas, itself). I've used a lot of different words to describe
this so far: task, job, process, &c. But I've never been very specific about
what I've meant -- to be honest, I've been a bit sloppy.
This abstraction is typically called a task. In a slightly different
form, it is known as a process. We'll discuss the subtle difference when
we discuss threads. The short version of the difference is that a task is
an abstraction that represents the instance of a program in execution, whereas
a process is a particular type of task with only one thread of control.
But, for now, let's not worry about the difference.
If we say that a task is an instance of a program in execution, what
do we mean? What is an instance? What is a program? What do we mean by
execution?
A program is a specification. It contains defintions of what type fo data is stored, how it can be accessed, and a set of instructions that tells the computer
how to accomplish something useful. If we think of the program as a
specification, much like a C++ class, we can think of the task as an instance
of that class -- much like an object built from the specification provided by
the program.
So, what do we mean by "in execution?" We mean that the task is a real
"object" not a "class." Most importantly, the task has state
associated with it -- it is in the process of doing something or changing
somehow. Hundreds of tasks may be instances of the same program, yet they
might behave very differently. This happens because the tasks were
exposed to different stimuli and their changed accordingly.
Representing a Task in Software
How do we represent a task within the context of an operating system?
We build a data structure, sometimes known as a task_struct
or (for processes) a Process Control Block (PCB) that contains
all of the information our OS needs about the state of the task. This
includes, among many other things:
- content of registers (like the PC)
- content of the stack
- memory pages/segments
- open files
When a context switch occurs, it is this information that needs to be
saved and restored to change the executing process.
The Life Cycle of a Process (For our present purposes, a Task)
Okay. So. Now that we've got a better understanding of the role of the
OS and the nature of a system call, let's move in the direction of this
week's lab. It involves the management of processes. So, let's begin
that discussion by considering the lifecycle of a process:
A newly created process is said to be ready or runnable.
It has everything it needs to run, but until the operating system's
schedule dispatches it onto a processor, it is just waiting.
So, it is put onto a list of runnable processes. Eventually, the OS
selects it, places it onto the processor, and it is actually
running.
If the timer interrupts its execution and the OS decides that it
is time for another process to run, the other process is said to
preempt it. The preempted process returns to the ready/runnable
list until it gets the opportunity to run again.
Sometimes, a running process asks the operating system to do
something that can take a long time, such as read from the disk
or the network. When that happens, the operating system doesn't
want to force the processor to idle while the process is waiting
for the slow action. Instead, it blocks the process.
It moves the proces to a wait list associated with the slow resource.
It then chooses another process from the ready/runnabel list to run.
Eventually, the resource, via an interrupt, will let the OS know that
the process can again be made ready to run. The OS will do what it
needs to do, and ready, a.k.a., make runnable, the previously blocked
process by moving it to the ready/runnable list.
Eventually a program may die. It might call exit under the programmer's
control, in which case it is said to exit or it might end
via some exception, in which case the more general term, terminated
might be more descriptive. When this happens, the process doesn't
immediately go away. Instead, it is said to be a zombie. The
process remains a zombie until its parent uses wait() or waitpid() to
collect its status -- and set it free.
If the parent died before the child, or if it died before waiting for
the child, the child becomes an orphan. Shoudl this happen, the
OS will reparent the orphan process to a special process called
init. Init, by convention, has pid 1, and is used at boot time
to start up other processes. But, it also has the special role of
waiting() for all of the orphans that are reparented to it. In this
way, all processes can eventually be cleaned up. When a process is
set free by a wait()/waitpid(), it is said to be reaped.
Tasks in Distributed Systems
In distributed systems, we find that the various resources needed to
perform a task are scattered across a network. This blurs the distinction
between a process and a task and, for that matter, a task and a thread.
In the context of distributed systems, a process and a thread
are interchangable terms -- they represent something that the user wants
done.
But, task has an interesting and slightly nuianced meaning. A
task is the collection of resources configured to solve a
particular problem. A task contains not only the open files and
communication channels -- but also the threads (a.k.a. processes).
Distributed Systems people see a task as the enviornment in which
work is done -- and the thread (a.k.a. process) as the instance of
that work, in progress.
I like to explain that a task is a factory -- all of the means of production
scattered across many assembly lines. The task contains the machinery and
the supplies -- as well the processes that are ongoing and making use of them.
Creating New Tasks
One of the functions of the operating system is to provide a mechanism for
existing tasks to create new tasks. When this happens, we call the original
task the parent. The new task is called the child. It is possible for one
task to have many children. In fact, even the children can have children.
In UNIX, child tasks can either share resources with the parent or obtain
new resources. But existing resources are not partitioned.
In UNIX when a new task is created, the child is a clone of the parent.
The new task can either continue to execute with a copy of the parent
image, or load another image. Well talk more about this soon, when we talk
about the fork() and exec-family() of calls.
After a new task is created, the parent may either wait()/waitpid() for the
child to finish or continue and execute concurrently (real or imaginary)
with the child.
Fork -- A traditional implementation
fork() is the system call that is used to create a new task
on UNIX systems. In a traditional implementation, it creates a new task
by making a nearly exact copy of the parent. Why nearly exact?
Some things don't make sense to be duplicated exactly, the ID number,
for example.
The fork() call returns the ID of the child process in the parent
and 0 in the child. Other than this type of subtle differences, the two
tasks are very much alike. Execution picks up at the same point in both.
If execution picks up at the same point in both, how can fork() return
something different in each? The answer is very straightforward.
The stack is duplicated and a different value is placed on top of each.
(If you don't remeber what the stack is, don't worry, we'll talk about
it soon -- just realize that the return value is different).
The difference in the return value of the fork() is very significant.
Most programmers check the result of the fork in order to determine
whether they are currently the child or parent. Very often the child
and parent to very different things.
The Exec-family() of calls
Since the child will often serve a very different purpose that its
parent, it is often useful to replace the child's memory space, that
was cloned form the parent, with that of another program. By replace,
I am referring to the following process:
- Deallocate the process' memory space (memory pages, stack, etc).
- Allocate new resources
- Fill these resources with the state of a new process.
- (Some of the parent's state is preserved, the group id,
interrupt mask, and a few other items.)
Fork w/copy-on-write
Copying all of the pages of memory associated with a process is a
very expensive thing to do. It is even more expensive considering that
very often the first act of the child is to deallocate this recently
created space.
One alternative to a traditional fork implementation is called
copy-on-write. the details of this mechanism won't be completely
clear until we study memory management, but we can get the flavor now.
The basic idea is that we mark all of the parent's memory pages as
read-only, instead of duplicating them. If either the parent or
any child try to write to one of these read-only pages, a page-fault
occurs. At this point, a new copy of the page is created for the writing
process. This adds some overhead to page accesses, but saves us the
cost of unnecessarly copying pages.
vfork()
Another alternative is also available -- vfork(). vfork is even
faster, but can also be dangerous in the worng hands. With vfork(),
we do not duplicate or mark the parent's pages, we simply loan them, and
the stack frame to the child process. During this time, the parent
remains blocked (it can't use the pages). The dangerous part is this:
any changes the child makes will be seen by the aprent process.
vfork() is most useful when it is immediately followed by an exec_().
This is because an exec() will create a completely new process-space,
anyway. There is no reason to create a new task space for the child,
just to have it throw it away as part of an exec(). Instead, we can
loan it the parent's space long enough for it to get started (exec'd).
Although there are several (4) different functions in the exec-family,
the only difference is the way they are parameterizes; under-the-hood,
they all work identically (and are often one).
After a new task is created, the parent will often want
to wait for it (and any siblings) to finish. We discussed the
defunct and zombie states last class. The wait-family of
calls is used for this purpose.
A Process's Memory
Before we talk about how a tasks' memory is laid out, let's
first look at the simpler case of a process -- a task with
only one thread of control.
Please note that the heap grows upward through dynamic allocation
(like malloc) and the stack grows downward as stack frames are
added throguh function calls. Such things as return addresses, return
values, parameters, local variables, and other state are stored in
the runtime stack.
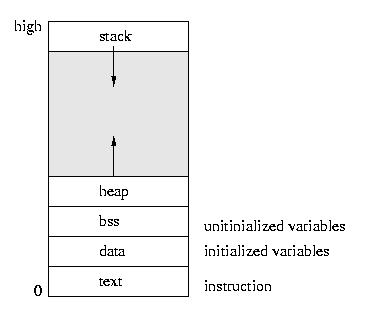
- The text area holds the program code.
- The data area holds global and static variables that must be
stored in the executible, since they are initialized.
- The bss area holds variables that are unitialized in the sense
that their need not be persistently stored on disk -- they can be
plugged in later.
The Conceptual Thread
In our discussion of tasks we said that a task
is an operating system abstraction that represents the state of a
program in execution. We learned that this state included such things as
the registers, the stack, the memory, and the program counter, as well
as software state such as "running," "blocked", &c. We also said that
the processes on a system compete for the systems resources, especially
the CPU(s).
Another operating system abstraction is called the thread.
A thread, like a task, represents a discrete piece of work-in-progress.
But unlike tasks, threads cooperate in their use of resources and in fact
share many of them.
We can think of a thread as a task within a task. Among other things
threads introduce concurrency into our programs -- many threads
of control may exist. Older operating systems didn't support
threads. Instead of tasks, they represented work with an abstraction
known as a process. The name process, e.g. first do ___,
then do ____, if x then do ____, finally do ____, suggests only
one thread of control. The name task, suggests a more general
abstraction. For historical reasons, colloquially we often say
process when we really mean task. From this point
forward I'll often say process when I mean task --
I'll draw our attention to the difference, if it is important.
The Implementation of Threads
All of the threads within a process exist within the context of that
process. They share the code section, data section, and operating system
resources such as open files.
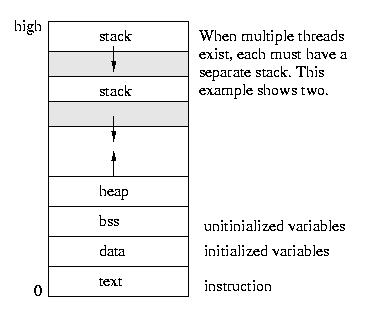
But they do not share all resources. Since each thread executes
independently, each thread has its own understanding of the stack and of
the registers.
The good part about sharing so many resources is that switching
execution among threads is less expensive than it is among processes.
The bad part is that unlike the protection that exists among processes,
the operating system can not prevent threads from interfering with each
other -- they share the same process space.
Kernel Threads
The most primitive implementations of threads were invisible to the
user. They existed only within the kernel. Many of the kernel daemons,
such at the page daemon, were implemented as threads. Implementing
different operating system functions as threads made sense for many
reasons:
- There was no need for protection, since the kernel developers trust
themselves. Please note that we lose memory protection
once we go from processes to threads -- they all play in the
same address space.
- The different OS functions shared many of the kernel's resources
- They can be created and destroyed very cheaply, so they can be
easily used for things like I/O requests and other intermitent
activities.
- It is very cheap to switch among them to handle various tasks
- It is very easy to thing of kernel activities in terms of
separate threads instead of functions within one monolithic
kernel.
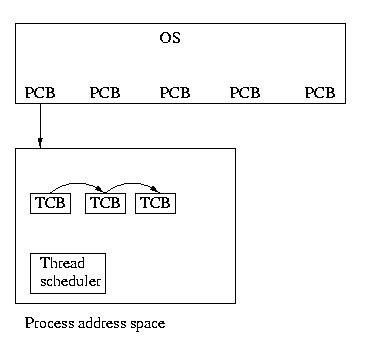
User Threads
But the UNIX developers couldn't keep such a great thing as their own
private secret for long. Users began to use threads via thread
libraries. Thread libraries gave users the illusion of
threads, without any involvement form the kernel. When a process
containing threads is executed, the thread scheduler, within the process,
is run. This scheduler selects which thread should run and for how long.
If a thread should block, the scheduler can select to run another thread
within the same process.
This implementation of threads is actually much more than an illusion. It
gives users the ability to write very efficient programs. These programs
can switch among threads and share resurces with very little overhead.
To switch threads, the registers must be saved and restored and the
stack must be switched. No expensive context switch is required.
Another advantage is that user level threads are implemented entirely
by a thread library -- from the interface to the scheduling. The kernel
doesn't see them or know about them.
Kernel-Supported User-Level Threads
Kernel threads are great for kernel writers and user threads answer many
of the needs of users, but they are not perfect. Consider these examples:
- On a multiprocessor system, only one thread within a process
can execute at a time
- A process that consists of many threads, each of which may be
able to execute at any time, will not get any more CPU time
than a process containing only one thread
- If any thread within a process makes a system call, all threads
within that process will be blocked because of the context switch.
- If any user thread blocks waiting for I/O or a resource, the entire
process blocks. (Thread libraries usually replace blocking calls
with non-blocking calls whenever possible to mitigate this.)
To address these needs, we need to have a kernel supported user thread.
That is to say, we need a facility for threads to share resources within
a process, but we also need the ability of the kernel to preempt, schedule,
and dispatch threads. This type of thread is called a kernel supported
user thread or a light-weight process (LWP). A light-weight
process is in contrast with a heavy-weight process otherwise known
as a process or task.
Our model of the universe has gone from looking like this:
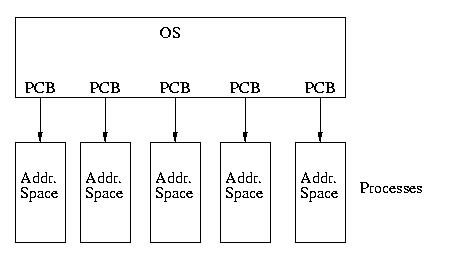
To looking like this:
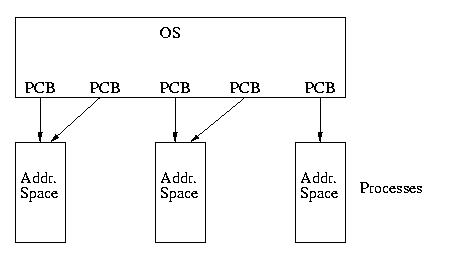
A More Complex Model
In some models, such as that used by Solaris, it is also possible to
assign several kernel-supported threads to a single process without
assigning them to specific user-level threads. In this case, the process
will have more opportunities to be seen by the OS's CPU scheduler. On
multiprocessor systems, the maximum level of concurrency is determined
by the number of LWPs assigned to the process (of course this is further
limited by the number of threads that are runnable within the process
and the number of available CPUs).
In the context of
Solaris, an LWP is a user-visible kernel thread. In some ways, it
might be better to view a Solaris LWP as a virtual light weight
processor (this is Kesden nomenclature!). This is because pools
of LWPs can be assigned to the same task. Threads within that task are
then scheduled to run on available LWPs, much like processes are scheduled
to run on available processors.
In truth, LWPs are anything but light weight. They are lighter weight
than (heavy weight) processes -- but they require far more overhead
than user-level threads without kernel support. Context-switching among
user-level threads within a process is much, much cheaper than context
switching among LWPs. But, switching among LWPs can lead to greater
concurrency for a task when user-level threads block within the kernel
(as opposed to within the process such that the thread scheduler can run
another).
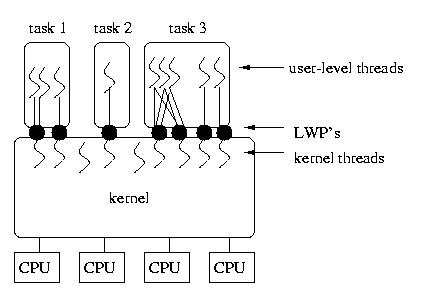
The diagram below shows LWP's associated with tasks and kernel threads, as
well as kernel threads without an associated LWP and several different
associations between user-level threads and the LWP(s) assigned to the
process.
LWP's offer a convenient and flexible compromise between user-threads and
separate processes. But it is important to realize that they are bulky
structures:
- Communications, even within a process, among LWPs requires
kernel involvement (read as: 2 context switches)
- LWPs are scheduled by the kernel, so blocking an LWP requires
kernel involvement.
- LWPs are very flexible, and very general -- this means that they
are very big. LWPs consume a great deal of resources
- LWPs are expensive to create and destroy, because this involves
the kernel
- LWPs are unpoliced, so users can create many of them, consuming
system resources, and starving other users processes by
getting more CPU time than similar processes with fewer LWPs.
Another Model
You might observe that threads within the same task share many of the
same resources -- the most significant difference is that they have
different stacks. This is exactly how Linux implements threads --
by leveraging the machinery it uses to create new processes.
In Linux, the system call beneath a fork() is known as clone(). It does
everything that fork() does -- but wiht a lot more flexibility. It allows
a newly created child to be created from the template of its parent by
either copying, sharing, or recreating various resources from the parent.
So, you can imagine that if all of the important resources are copies --
clone() is, in effect, a fork().
But, imagine two different processes that, in essence, share everything
but the stack. These processes are sharing global memory, so they are
really in the smae memory context -- but they have differnt stacks, so
can be doing different things. They are, in effect, threads.
So, as Linux evolved, they created kernel-supported threads by leveraging
clone() to create new processes that shared resources. They then created
a new task abstraction that aggregated related processes. So, in the
Linux model, within the kernel, a task is genuinely a collection of
processes. From the user's perspective, these thread-like processes
are presented as threads by the user-level thread library.
Scheduling Basics
Scheduling the access of processes to non-sharable resources is a
fundamental part of an operating system's job. The same is
true of the thread scheduler within a user-level thread library.
The CPU is the most important among these resource, because it typically
has the highest contention. The high cost of additional CPUs, both in terms
of the price of the processor and the cost of the technology in massively
parallel systems, ensures that most systems don't have a sufficient surplus
of CPUs to allow for their wasteful use.
The primary objective of CPU scheduling is to ensure that as many jobs
are running at a time as is possible. On a single-CPU system, the goal
is to keep one job running at all times.
Multiprogramming allows us to keep many jobs ready to run at all times.
Although we can not concurrently run more jobs than we have available
processors, we can allow each processor to be running one job, while
other jobs are waiting for I/O or other events.
Observation: The CPU-I/O Burst Cycle
During our discussion of scheduling, I may make reference to the
CPU-I/O burst cycle. This is a reference to the observation that
programs usually have a burst of I/O (when the collect data) followed
by a burst of CPU (when they process it and request more). These bursts
form a cycle of execution.
Some processes have long bursts of CPU usage, followed by short bursts of
I/O. We say that thee jobs are CPU Bound.
Some processes have long bursts of I/O, followed by short bursts of
CPU. We say that thee jobs are I/O Bound.
The CPU Scheduler
Some schedulers are only invoked after a job finishes executing or
voluntarily yield the CPU. This type of scheduler is called a
non-premptive scheduler.
- A process blocks itself waiting for a resource or event
- A process terminates
But, in order to support interaction, most modern schedulers are
premeptive. They make use of a hardware timer to interrupt running
jobs. When a scheduler hardware interrupt occurs, the scheduler's
ISR (Interrupt Service Routine) is invoked and it runs. When this happens, it can continue the
previous task or run another. Before starting a new job, the
scheduler sets the hardware timer to generate an interrupt after
a particular amount of time. This time is known as the time
quantum. It is the amount of time that a job can run without
interruption.
A preemptive scheduler may be invoked under the following four
circumstances:
- A process blocks itself waiting for a resource or event
- A process terminates
- A process moves from running to ready (interrupt)
- A process moves from waiting to ready (blocking condition satisfied)
The Dispatcher
Once the CPU scheduler selects a process for execution, it is the job of
the dispatcher to start the selected process. Starting this process
involves three steps:
- Switching context
- Switching to user mode
- Jumping to the proper location in the program to start or
resume execution
The latency introduced by the dispatch is called the dispatch
latency. Obviously, this should be as small as possible -- but is
most critical in real-time system, those systems that must
meet deadlines associated with real world events. These systems are
often associted with manufacturing systems, monitoring systems, &c.
Actually, admission is also much more important in these systems --
a job isn't automically admitted, it is only admitted if the system
can verify that enough resources are available to meet the deadlines
associated with the job. But real-time systems are a different story
-- back to today's tale.
Scheduling Algorithms
So, given a collection of tasks, how might the OS (or the
user-level thread scheduler) decide which to place on an available CPU?
First Come, First Serve (FCFS)
First In, First Out (FIFO)
FCFS is the simplest algorithm. It should make sense to anyone who has
waited in line at the deli, bank, or check-out line, or to anyone
who has ever called a customer service telephone number, "Your
call will be answered in the order in which it was received."
The approach is very simple. When a job is submitted, it enters the ready
queue. The oldest job (has been in the ready queue for the longest time)
in the ready queue is always selected to be dispatched. The algorithm is
non-premptive, so the job will run until it voluntarily gives up the CPU
by blocking or terminating. After a blocked process is satisfied and
returns to the ready queue, it enters at the end of the line.
This algorithm is very easy to implement, and it is also very fair and
consequently starvation-free. No characteristic of a job bias its
placement in the queue. But it does have several disadvantages.
- Because short jobs can be scheduled after very long jobs,
the average wait time can be increased. Unlike the grocery
store, the algorithm has no "Express Lane."
- Since the algorithm is non-premptive, there can be problems
on interactive systems. A long job may prevent responsiveness
to the user.
- A student actually pointed out this more subtle property
during class in the form of a question (good job!)
It is possible for one CPU bound process to hog the CPU for
a long time. In the meantime several I/O bound processes, that
could execute concurrently with the CPU-bound process, can't
start.
I didn't give this phenomenon a name in class, but
I probably should have -- it is called the convoy effect,
because cycle after cycle, the I/O bound processes will "follow"
the CPU bound processes, without overlapping.
Bonus Material
Everything in this section goes above and beyond lecture. It is just here
for those who happen to be curious for more real-world detail.
Shortest-Job-First (SJF)
Another apporach is to consider the expected length of each processes's
next CPU burst and to run the process with the shortest burst next. This
algorithm optimizes the average waiting time of the processes. This is
because moving a shorter job ahead of a longer job helps the shorter
job more than it hurts the longer job. Recall my lunchroom story --
those who ate early had no lines, although there wasn't anyone to
vouch for this.
Unfortunately, we have no good way of knowing for sure the length of any
jobs next CPU burst. In practice this can be estimated using an exponential
average of the jobs recent CPU usage. In the past, programmers estimated
it -- but if their jobs went over their estimate, they were killed.
programmers got very good at "The Price Is Right."
Sometimes this algorithm is premeptive. A job can be prempted if another
job arrives that has a shorter execution time. This is flavor is often
called shortest-remaining-time-first (SRTF).
Shortest-Time-To-Completion-First (STCF)
Shortest CPU time to Completion First (STCF). The process that will
complete first runs whenever possible. The other processes only run
when the first process is busy with an I/O event.
But, much like SJF, the CPU time is not known in advance.
Priority Scheduling (PRI)
Priority scheduling is designed to strictly enforce the goals of a system.
Important jobs always run before less important jobs. If this scheduling
discipline is implemented preemeptively, more important jobs will preempt
less important jobs, even if they are currently running.
The bigest problem with priority-based scheduling is starvation.
it is possible that low priority jobs will never execute, if more
important jobs continually arrive.
Round Robin Scheduling (RR)
Round Robin scheduling can be thought of as a preemptive version of FCFS.
Jobs are processed in a FCFS order from the run queue. As with FCFS,
if they block, the next process can be scheduled. And when a blocked
process returns to the ready queue, it is placed at the end of the list.
The difference is that each process is given a time quantum or
time slice. A hardware timer interrupt preemept the running
process, if it is still running after this fixed amount of time.
The scheduler can then dispatch the next process in the queue.
With an appropriate time quantum, this process offeres a better
average case performance than FCFS without the guesswork of SJF.
If the time quantum is very, very small, an interesting effect is
produced. If there are N processes, each process executes as if
it were running on its own private CPU running at 1/N th the speed.
This effect is called processor sharing.
If the time quantum is very, very large -- large enough that the
processes generally complete before it expires, this approach
approximates FCFS.
The time quantum can be selected to balance the two effects.
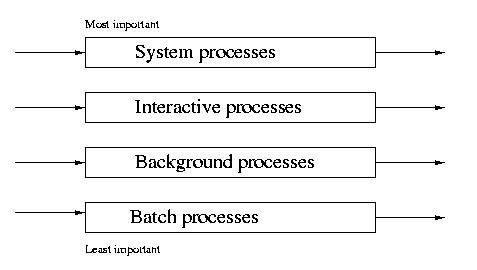
Multilevel Queue Scheduling (MQS)
MQS is similar to PRI, except that the jobs arrive sorted by their
priority. For example, all system jobs may have a higher priority than
interactive jobs, which enjoy a higher priority than batch jobs.
Jobs of different priorities are placed into different queues.
In some implementations, jobs in all higher priority queues must be
executed before jobs in any lower priority queue. This absolute approach
can lead to starvation in the same way as its simplier cousin, PRI.
In some preemptive implementations, a lower-priority process will be
returned to its ready queue, if a higher-priority process arrives.
Another approach is to time-slice among the queues. Higher priority
queus can be given longer or more frequent time slices. This approach
prevents absolute starvation.
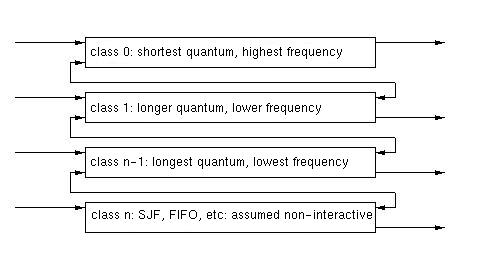
Multilevel Feedback Queue (MFQ)
In the multilevel queuing system we described above, there is no social
mobility. When aprocess arrives, it is placed in a queue based on its
initial classification. It remains in this queue throughout its lifetime.
In a MFQ system, a process's priority can change as the result of its CPU
utilization. Processes that have longer CPU bursts are lowered in
importance. Processes that are I/O bound and frequently release the CPU
prematurely by blocking are increased in importance.
This system prevents starvation and gives I/O bound processes the change
to be dispatched and overlap with CPU bound processes. It fights the
convoy effect.
Scheduling among queues can be done by varying the lenght or frequence
of the time slice. Scheduling within each queue can also be varied.
Although this system sounds very pretty, it is very complex. In general
this type of system is defined by the following parameters:
- the number of queues
- the method of scheduling for each queue
- the method of scheudling among the queues
- the method of promoting a process
- the method of demoting a process
Traditional UNIX Scheduling - Introduction
I thought it would be interesting to spend some time considering
scheduling in a real-world operating system. Today we'll talk about what
I call "traditional" UNIX scheduling. This scheduling system was used,
with little variation through AT&T SVR3 and 4.3BSD. Newer UNIX's use
more sophisticated approaches, but this is a good place to start.
Priorities
The scheduling in these systems was priority based. The priority of a
process ranged from 0 - 127. Counterintuitively, lower priorities
represent more important processes.
The range of priorities is partitioned. Priorities in the range of
0 - 49 are reserved for system processes. Both user and system processes
may have priorities over the full range from 0 - 127. Ths prevents
user processes from interfereing with more important system tasks.
Parameters
A processes ultimate scheduling priority varies with several factors.
The accounting of these factors is kept in the proc structure,
which contains the following fields:
- p_pri - current scheduling priority
- p_usrpri - the process's priority in user mode
- p_cpu - a measure of the prcoess's recent CPU usage
- p_nice - a user supplied measure of the process's importance.
Elevated Priority in System Mode
p_pri is a number in the range of 0 - 127 that represents the
priority of the process. This is the value of that the scheduler considers
when selecting a process to be dispatched. This value is normally the
same as p_usrpri. It however, may be lowered (making the process more
important) while the process is making a system call.
Traditional UNIX systems did not have preemptive kernels. This meant that
only one process could be in the kernel at a time. If a process blocked
while in a system call, other user processes could run, but not other
system calls or functions. For this reason a process which had blocked
while in a system call often would have its p_pri value lowered so
that it would expeditiously complete its work in the kernel and return
to user mode. This allowed other processes that blocked waiting to enter
the kernel to make progress. Once the system call is complete, the
process's p_pri is reset to its p_usrpri.
User Mode Priority
The priority that a process within the kernel receives after returning
from the blocked queue is called its sleep priority. There is
a specific sleep priority associated with every blocking condition.
For example, the sleep priority associated with terminal I/O was
28 and disk I/0 was 20.
The user mode scheduling priority depends on three factors:
- the default user mode priority, PUSER, typically 50
- the process's recent CPU usuage, p_cpu
- the nice value assigned by the user, p_nice
The p_usr value is a system-wide default. In most implementations it
was 50, indicating the most important level of scheduling for a user
process.
Let's be Nice
The p_nice value defaults to 0, but can be increased by users who
want to be nice. Remember that the likelihood of a process to be dispatched
is inversly proportional to the priority. By increasing the process's
nice value, the process is deacreasing its likelihood of being scheduled.
Processes are usually "niced" if they are long-running, non-interactive
backgorund processes.
Tracking CPU usage
p_cpu is a measure of the process's recent CPU usage. It ranges from
0 - 127 and is initially 0. Ever 1/10th of a second, the ISR that handles
clock ticks increments the p_cpu for the current process.
Every 1 second another ISR decreases the p_cpu of all processes, running
or not. This reduction is called the decay. SVR3 used a fixed
decay of 1/2. The problem with a fixed decay is that it elevates the
priority of nearly all processes if the load is very high, since very
few processes are getting CPU. This makes the p_cpu field nearly meaningless.
The designers of 4.3BSD remedied this side-effect by using a variable decay
that is a fuction of the systems load average, the average number
of processes in the run queue over the last second. This formula follows:
decay_factor = (2*load_average)/ (2*load_average + 1)
User Mode Priority - Final Formula
The scheduler computes the process's user priority form these factors
as follows:
p_usrpri = PUSER + (p_cpu/4) + (2*p_nice)
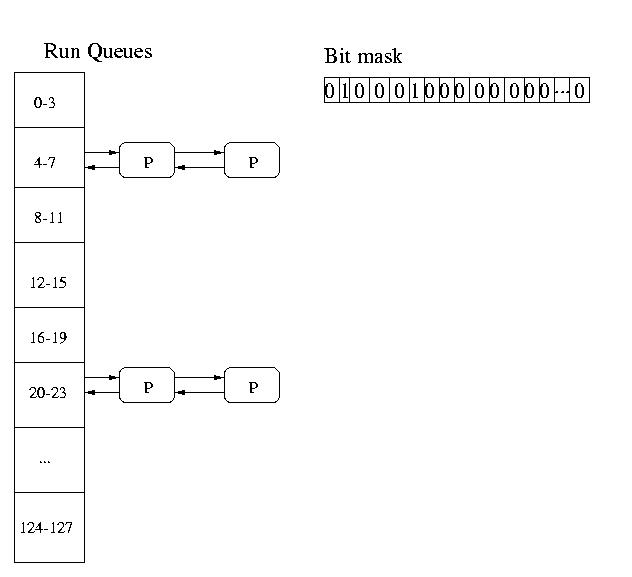
Implementation
Artifacts of the old DEC VAX systems made it much more efficient
to collapse the 127 priorities into 32 queues. So these systems
in effect had 32 queues each holding processes in a range of
4 priority levels (0-3, 4-7, 8-11, 12-15, 16-19, etc).
The system maintained a 32-bit mask. Each bit represented a single
queue. If the bit was set, there were jobs in the queue. If the bit was 0,
the queue was empty. The system charged from low-bit to high-bit in this
mask until it found a non-empty queue. It would then select a job
Round Robin (RR) from this queue to be dispatched.
The round-robin scheduling with a time quantum of 100mS only applied to
processes in the same queue. If a process arrived in a lower priority
(more important) queue, that process would be scheduled at the end
of the currently executing process's quantum.
High priority (less important) processes would not execute until all
lower priority (more important) queues were empty.
The queues would be check by means of the bit mask every time a process
blocked or a time quantum expired.
Analysis
This method of scheduling proved viable for general purpose systems,
but it does have several limitations:
- it falls apart with a massive number of processes - the
overhead of recomputing priorities for every process every second
becomes too high
- nice values are a very weak and underutilized way for applications
to affect their priorities -- how often doyou nice your jobs?
- A non-preemptive kernel means that important processes may have to
wait for lower priority processes in the kernel. The temporary
sleep priority is a weak solution.